Möglich mit ATI F/T-Sensoren und Universalrobotern
Hersteller sind stets bestrebt, die Produktivität zu steigern und die Kosten zu senken. Die Automatisierung von Montageaufgaben, die manuell ausgeführt werden, kann ein großes Potenzial zur Steigerung der Effizienz bieten, birgt aber auch einige Herausforderungen. Traditionell werden Roboter gesteuert, indem sie so programmiert werden, dass sie einer gewünschten Bahn folgen. Selbst die kleinste Abweichung von der Geometrie des Teils kann zu unbefriedigenden Ergebnissen führen und Schäden an Teilen und Werkzeugen verursachen. Bei einigen komplexen Montageaufgaben, wie z. B. dem Einsetzen von Nockenwellen in Motorblöcke, muss sich der Monteur an die richtige Montageposition herantasten“. Roboter allein können die bei diesen Montageaufgaben auftretenden Kontaktkräfte nicht genau messen und kompensieren.
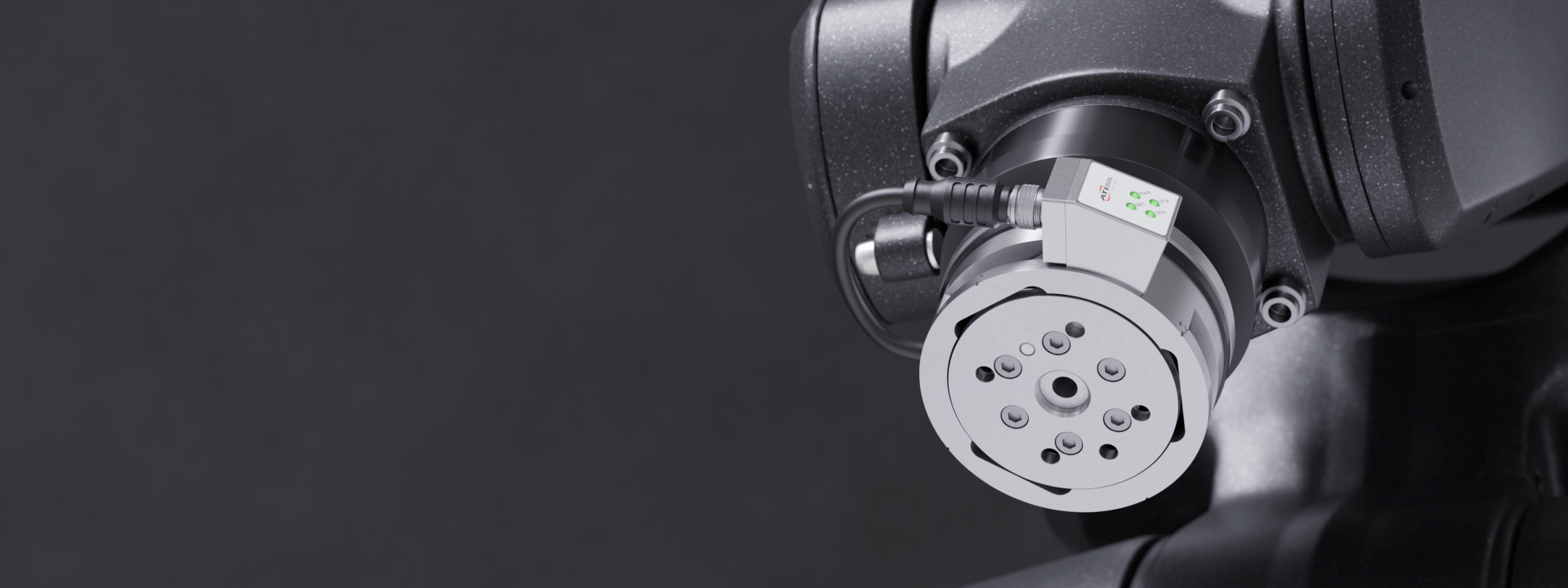
Die sechsachsigen Kraft-/Drehmomentsensoren (F/T) von ATI Industrial Automation und die Universalroboter können nun eine Vielzahl schwieriger Montageaufgaben mit Hilfe der Kraftkontrolle erledigen. Die F/T-Sensoren von ATI bieten ein hohes Maß an Empfindlichkeit und übermitteln dem Roboter extrem genaue Informationen über die Kraft oder das Drehmoment, die auf ihn einwirken, so dass er entsprechend reagieren kann. Dieses Force Control-Feedback ermöglicht es dem Roboter, das Teil zu fühlen“, wodurch das Risiko einer Beschädigung minimiert wird. Präzisionsmontageaufgaben, die manuell ausgeführt werden oder sich als zu schwierig für eine Automatisierung erwiesen haben, können jetzt mit Force Control ausgeführt werden, um die Produktionsqualität und den Durchsatz erheblich zu steigern und gleichzeitig eine sicherere Arbeitsumgebung zu schaffen, indem die mit schwierigen manuellen Montageaufgaben verbundenen ergonomischen Probleme beseitigt werden. Getriebemontage, Einsetzen von Nockenwellen oder Kolben, elektronische Montage, Lebenszyklustests, Gewichtsüberprüfung und Haptik sind nur einige der Anwendungen, die mit Universalrobotern, die mit ATI Sechs-Achsen-Kraft-/Drehmomentsensoren ausgestattet sind, durchgeführt werden können.
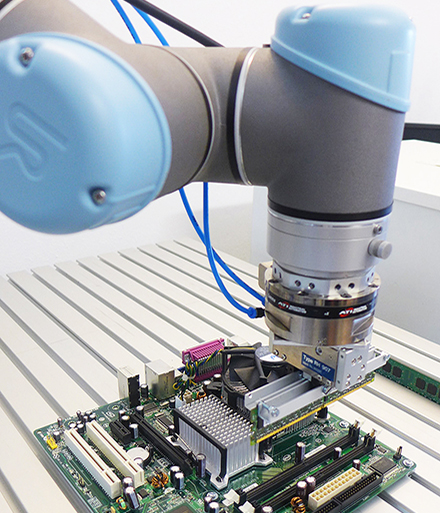
Vor kurzem wurde eine Demonstrationsanwendung entwickelt, bei der das Net F/T-System von ATI und ein UR5-Universalroboter eingesetzt wurden, der über Modbus over Ethernet kommuniziert. Die Programmierung des Roboters erfolgte in seinen eigenen Sprachen Polyscope und Script. Die Netbox und der sechsachsige Kraft-/Drehmomentsensor der Gamma-Serie von ATI wurden verwendet, um Daten an das Ende des Roboterarms weiterzuleiten.
Weitere Informationen über ATI Sechs-Achsen-Kraft-/Drehmomentsensoren finden Sie hier.
Weitere Informationen über Universal Robots finden Sie hier.