Traditionell verlassen sich Chirurgen auf eine Kombination aus Erfahrung, Muskelgedächtnis und Tastsinn, um instinktiv die richtigen Instrumente und Techniken für jeden Eingriff zu bestimmen. Je mehr Operationen sie durchführen, desto mehr verfeinern sich diese Instinkte. Wenn sich ein Chirurg zum Operationstisch begibt und ein Werkzeug in die Hand nimmt, hat er bereits die richtige Schnittführung und die für die Aufgabe erforderlichen Kontaktkräfte bestimmt.
Die Fähigkeit eines Chirurgen, sein Wissen und seine Intuition bei der Durchführung von Eingriffen einzusetzen, macht ihn zu einem äußerst effizienten und gefragten Experten in seinem jeweiligen Fachgebiet. Indem sie ihre Erfahrungen und ihre Sinne einsetzen, operieren Chirurgen buchstäblich nach Gefühl und können während des Eingriffs Anpassungen in Echtzeit vornehmen. Einem Roboter beizubringen, eine so komplexe Aufgabe wie einen chirurgischen Eingriff an einem Menschen durchzuführen, ist eine Herausforderung, da diese Art von Automatisierungsausrüstung nur über sehr begrenzte Funktionen verfügt. Ein Roboter verfügt weder über ein Gedächtnis noch über Sinnesorgane und bietet kaum Möglichkeiten zur dynamischen Steuerung oder aktiven Unterstützung. Mit Technologien wie den Kraft-/Drehmomentsensoren von ATI sind Roboter in der Lage, ihre Umgebung zu erfühlen und Aufgaben mit höherem Mehrwert zu übernehmen.
An der Vanderbilt University befindet sich das Advanced Robotics and Mechanism Applications (ARMA) Lab unter der Leitung von Professor Nabil Simaan. Das Labor ist Teil der Fakultät für Maschinenbau der Universität und konzentriert sich auf die Forschung an fortschrittlichen Robotern für medizinische Anwendungen. Die ARMA-Forschung zielt darauf ab, Roboteroperationen so einzusetzen, dass sich die Beschwerden der Patienten und die Genesungszeit verringern. Eine Möglichkeit, dies zu erreichen, besteht darin, bei minimal-invasiven Eingriffen die Verbindung zwischen Chirurgen und Operationsrobotern herzustellen. Sie hoffen, durch die Verringerung der Variabilität bei robotergestützten Eingriffen ein höheres Niveau der Patientenversorgung zu erreichen.
Heutige Operationsroboter sind in hohem Maße von menschlichen Eingaben abhängig: Auch wenn ein Roboter die Werkzeuge bewegt und den Patienten physisch berührt, müssen sie dennoch „programmiert“ werden, um zu wissen, welches Werkzeug zu verwenden ist, wo es zu platzieren ist, wann geschnitten werden soll, wie viel Kraft anzuwenden ist usw. Der Chirurg verwaltet all diese Variablen aus der Ferne, zusätzlich zur Ausführung des Eingriffs selbst, was die Roboterchirurgie mühsam macht.
Die ARMA-Forscher bemühen sich, den Roboter zu einem aktiveren Teilnehmer zu machen, um den Chirurgen zu entlasten. Die Umkehrung des Tastsinns eines Chirurgen war für sie eine große Herausforderung. Chirurgen arbeiten nach Gefühl, was bedeutet, dass das genaue Ausmaß der Kontaktkräfte, die für die Durchführung von Eingriffen erforderlich sind, unbekannt ist. Dr. Simaan und sein Team entwickelten ein interaktives Modell, das die Messung und Steuerung von Kontaktkräften durch Rückmeldungen von ATI Industrial Automation’s Force/Torque (F/T) Sensoren ermöglicht.
Das von ihnen entwickelte Modell interpretiert die Informationen über die Kontaktkräfte, die bei simulierten Roboteroperationen gesammelt werden. Die Anwendung umfasst einen DaVinci Research Kit-Roboterarm und einen ATI F/T-Sensor, der an einem „Patienten“ aus Silikon befestigt ist. Während der Chirurg den Eingriff durchführt, werden die Kräfte und Drehmomente, die der Roboter auf die Siliziumattrappe ausübt, in Echtzeit erfasst und geben Aufschluss darüber, was ein menschlicher Patient erlebt.
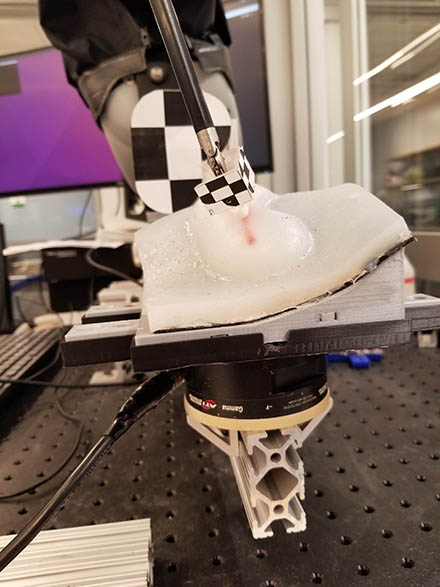
In der Realität können wir keinen Kraftsensor im menschlichen Körper platzieren, um diese Daten zu erfassen. Die ARMA-Anwendung stellt jedoch ein fehlendes Bindeglied zwischen dem entfernten Chirurgen und der Patientenseite des Eingriffs dar. Durch die Entwicklung eines Prognosemodells können Chirurgen die Auswirkungen des Prozesses auf den Körper verstehen. Die F/T-Sensoren von ATI erfassen Daten aus allen sechs Freiheitsgraden gleichzeitig, was hochgenaue, präzise Positionsdaten zur Darstellung realistischer Modelle ermöglicht. Die Informationen werden während des gesamten simulierten Vorgangs live aktualisiert, während sich das Modell an die Änderungen von Kraft und Drehmoment anpasst. Das Ergebnis ist ein detailliertes Profil darüber, wie sich die Kräfte und Drehmomente des Eingriffs auf den Patienten auswirken, und hilft bei der Quantifizierung von Kontaktkräften, die bisher nur nach Gefühl bekannt waren.
Das genaue Verständnis der Interaktion zwischen dem Roboter und der menschlichen Anatomie in Bezug auf Kräfte und Drehmomente ermöglicht eine ausgefeiltere Funktionalität der chirurgischen Roboter. Der F/T-Sensor von ATI könnte zum Beispiel auf der Roboterseite der Anwendung integriert werden, um die Kontaktkräfte während der Roboterchirurgie zu überwachen und zu steuern. Mit haptischer Rückmeldung fungiert der Sensor als virtuelle Halterung für die Hände des Chirurgen. Er würde dazu beitragen, den Fokus des Chirurgen zu straffen und zu verhindern, dass übermäßige Kräfte auf den Patienten ausgeübt werden. ARMA ermöglicht es chirurgischen Robotern, durch den Einsatz von Roboter- und Kraftsensortechnologien eine aktivere Rolle im Prozess zu übernehmen. Kontaktkraftdaten von ATIs F/T-Sensoren in Kombination mit der Fähigkeit der Roboter, anspruchsvolle, hochpräzise Aufgaben mit Wiederholbarkeit auszuführen, helfen dem Chirurgen, während robotergestützter Operationen in Kontakt zu bleiben.
Diese Forschung vereinfacht robotergestützte Verfahren, indem sie Chirurgen und Gesundheitsdienstleistern hilft zu verstehen, wie minimal-invasive Operationen standardisiert werden können. Die Identifizierung von Best Practices für diese Operationen wird die Patientenversorgung und die Zugänglichkeit zu Operationen verbessern sowie die Erholungszeit minimieren. Mit den F/T-Sensoren von ATI ermöglicht die ARMA-Forschung Robotern die aktive Unterstützung von Roboteroperationen, indem sie den Chirurgen mit dem Patienten verbindet.
Für weitere Informationen über das Advanced Robotics and Mechanism Applications (ARMA) Lab klicken Sie hier.
Für weitere Informationen über die Kraft-/Drehmomentsensoren von ATI klicken Sie bitte hier.