Posible con los sensores F/T y los robots universales de ATI
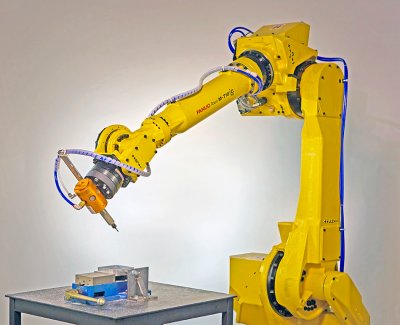
Los fabricantes siempre buscan aumentar la productividad y reducir los costes. La automatización de las tareas de montaje que se realizan manualmente puede ofrecer un gran potencial para aumentar la eficiencia, pero plantea varios retos. Tradicionalmente, los robots se controlan programándolos para que sigan una trayectoria deseada. Incluso la más mínima variación en la geometría de la pieza puede producir resultados insatisfactorios y dañar la pieza y las herramientas. Algunas tareas de montaje complejas, como la inserción de árboles de levas en bloques de motor, requieren que el montador “palpe” su trayectoria hasta la posición de montaje correcta. Los robots por sí solos no pueden medir y compensar con precisión las fuerzas de contacto experimentadas durante estas tareas de montaje.
Los sensores de fuerza/par (F/T) de seis ejes y los robots universales de ATI Industrial Automation pueden realizar ahora una gran variedad de difíciles tareas de ensamblaje utilizando el control de fuerza. Los sensores F/T de ATI ofrecen un alto nivel de sensibilidad, enviando al robot información extremadamente precisa sobre la fuerza o el par que se aplica contra él, permitiéndole reaccionar adecuadamente. Esta información de Control de Fuerza permite al robot “sentir” la pieza, minimizando el riesgo de daños. Las tareas de ensamblaje de precisión que se realizan manualmente o que resultan demasiado difíciles de automatizar pueden realizarse ahora utilizando el control de fuerza para aumentar considerablemente la calidad y el rendimiento de la producción, al tiempo que se crea un entorno de trabajo más seguro al eliminar los problemas ergonómicos asociados a las difíciles tareas de ensamblaje manual. El ensamblaje de engranajes, la inserción de árboles de levas o pistones, el ensamblaje electrónico, las pruebas de ciclo de vida, la verificación del peso y la háptica son sólo algunas de las aplicaciones que pueden llevarse a cabo utilizando robots universales equipados con sensores de fuerza/par de seis ejes de ATI.
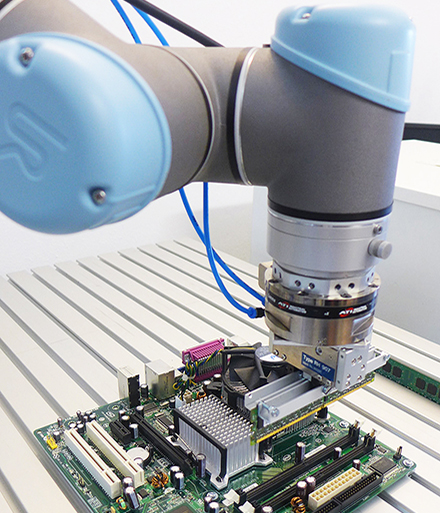
Recientemente se ha desarrollado una aplicación de demostración utilizando el sistema Net F/T de ATI y un Robot Universal UR5 que se comunica mediante Modbus a través de Ethernet. La programación del robot se realizó en sus propios lenguajes Polyscope y Script. Utilizó el Netbox de ATI y el sensor de Fuerza/Torque de Seis-Ejes de la serie Gamma para transmitir datos en el extremo del brazo del robot.
Más información sobre los sensores de fuerza/par de seis ejes de ATI aquí.