Tradicionalmente, los cirujanos dependen de una combinación de experiencia, memoria muscular y sentido del tacto para determinar instintivamente las herramientas y técnicas correctas para realizar cada intervención. A medida que realizan más intervenciones quirúrgicas, estos instintos se van afinando. En el momento en que un cirujano se traslada a la mesa de operaciones y coge una herramienta, ya ha determinado la ubicación correcta de la incisión y las fuerzas de contacto necesarias para completar la tarea.
La capacidad de un cirujano de utilizar sus conocimientos y su intuición para llevar a cabo procedimientos le convierte en un experto muy eficaz y solicitado en sus respectivos campos. Gracias a su experiencia y a sus sentidos, los cirujanos operan literalmente al tacto y pueden realizar ajustes en tiempo real. Enseñar a un robot a realizar una tarea tan compleja como operar a un ser humano es todo un reto, ya que este tipo de equipos de automatización presentan una funcionalidad muy limitada. Un robot por sí solo no tiene memoria ni sentidos y ofrece muy poco en cuanto a control dinámico o asistencia activa. Con tecnología como los sensores de fuerza/par de ATI, los robots tienen la capacidad de sentir su entorno y pueden realizar tareas de mayor valor añadido.
La Universidad de Vanderbilt alberga el Laboratorio de Aplicaciones Avanzadas de Robótica y Mecánica (ARMA), dirigido por el profesor Nabil Simaan. El laboratorio forma parte de la Escuela de Ingeniería Mecánica de la Universidad y se centra en la investigación robótica avanzada para aplicaciones médicas. La investigación de ARMA busca desplegar cirugías robóticas que reduzcan las molestias y el tiempo de recuperación de los pacientes. Una forma de conseguirlo es tender un puente entre los cirujanos a distancia y los robots quirúrgicos en procedimientos mínimamente invasivos. Esperan poder ofrecer un mayor nivel de atención al paciente reduciendo la variabilidad de la cirugía robótica.
Los robots quirúrgicos actuales dependen en gran medida de la intervención humana: aunque un robot mueva las herramientas y toque físicamente al paciente, sigue necesitando “programación” para saber qué herramienta utilizar, dónde colocarla, cuándo cortar, cuánta fuerza emplear, etc. El cirujano gestiona todas estas variables a distancia, además de ejecutar el procedimiento en sí, lo que hace que la cirugía robótica sea tediosa.
Los investigadores de ARMA se esfuerzan por hacer de los robots un participante más activo para ayudar a salvar la desconexión de los cirujanos. La ingeniería inversa del sentido del tacto del cirujano ha sido todo un reto para ellos. Los cirujanos trabajan por tacto, lo que significa que se desconocen las cantidades exactas de fuerzas de contacto necesarias para ejecutar los procedimientos. El Dr. Simaan y su equipo desarrollaron un modelo interactivo que permite medir y controlar las fuerzas de contacto a través de la retroalimentación de los sensores de fuerza/par (F/T) de ATI Industrial Automation.
El modelo que idearon interpreta la información de fuerza de contacto obtenida de la cirugía robótica simulada. La aplicación incluye un brazo robótico DaVinci Research Kit y un sensor F/T de ATI montado en un “paciente” de silicona. A medida que el cirujano ejecuta el procedimiento, las fuerzas y los pares ejercidos por el robot sobre la maqueta de silicona se capturan en tiempo real, lo que proporciona información sobre lo que experimenta un paciente humano.
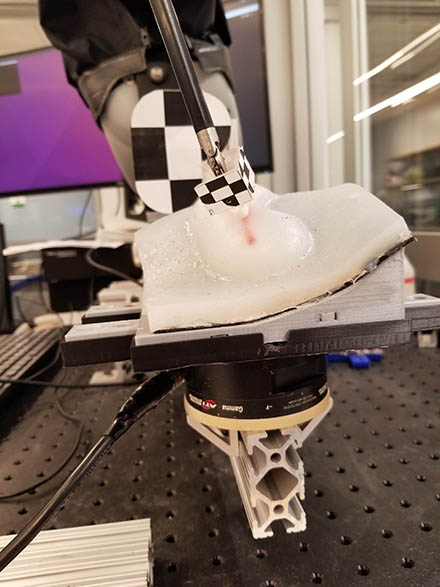
En realidad, no podemos colocar un sensor de fuerza dentro del cuerpo humano para recoger estos datos. Sin embargo, la aplicación ARMA proporciona el vínculo que faltaba entre el cirujano a distancia y el paciente durante la intervención. Mediante el desarrollo de un modelo de previsión, los cirujanos pueden comprender el impacto del proceso en el cuerpo. Los sensores F/T de ATI capturan datos de los seis grados de libertad simultáneamente, lo que permite obtener datos de localización precisos y de gran exactitud para elaborar modelos realistas. La información se actualiza en directo a lo largo del procedimiento simulado mientras el modelo se adapta para reflejar los cambios de fuerza y torsión. El resultado es un perfil detallado del impacto de las fuerzas y torsiones de la cirugía en el paciente que ayuda a cuantificar fuerzas de contacto que antes sólo se conocían por el tacto.
Comprender exactamente cómo interactúa el robot con la anatomía humana en lo que respecta a fuerzas y pares permite una funcionalidad más sofisticada de los robots quirúrgicos. Por ejemplo, el sensor F/T de ATI podría integrarse en el lado del robot de la aplicación para supervisar y controlar las fuerzas de contacto durante la cirugía robótica. Con retroalimentación háptica, el sensor actúa como un accesorio virtual para las manos del cirujano. Ayudaría a agilizar la concentración del cirujano y evitaría aplicar fuerzas excesivas al paciente. ARMA permite a los robots quirúrgicos asumir un papel más activo en el proceso aprovechando las tecnologías robóticas y de detección de fuerzas. Los datos de fuerza de contacto de los sensores F/T de ATI, combinados con la capacidad de los robots para realizar tareas exigentes de alta precisión con repetibilidad, ayudan a los cirujanos a mantenerse en contacto durante las cirugías robóticas.
Esta investigación simplifica los procedimientos asistidos por robot ayudando a cirujanos y profesionales sanitarios a comprender cómo estandarizar las cirugías mínimamente invasivas. La identificación de las mejores prácticas en estas cirugías mejorará la atención al paciente y la accesibilidad a las operaciones, además de minimizar el tiempo de recuperación. Con los sensores F/T de ATI, la investigación ARMA permite a los robots asistir activamente a las cirugías robóticas conectando a los cirujanos con la experiencia del paciente.
Para más información sobre el Laboratorio de Robótica Avanzada y Aplicaciones Mecánicas (ARMA), haga clic aquí.
Para más información sobre los sensores de fuerza/par de ATI, haga clic aquí.