Possible avec les capteurs ATI F/T et les robots universels
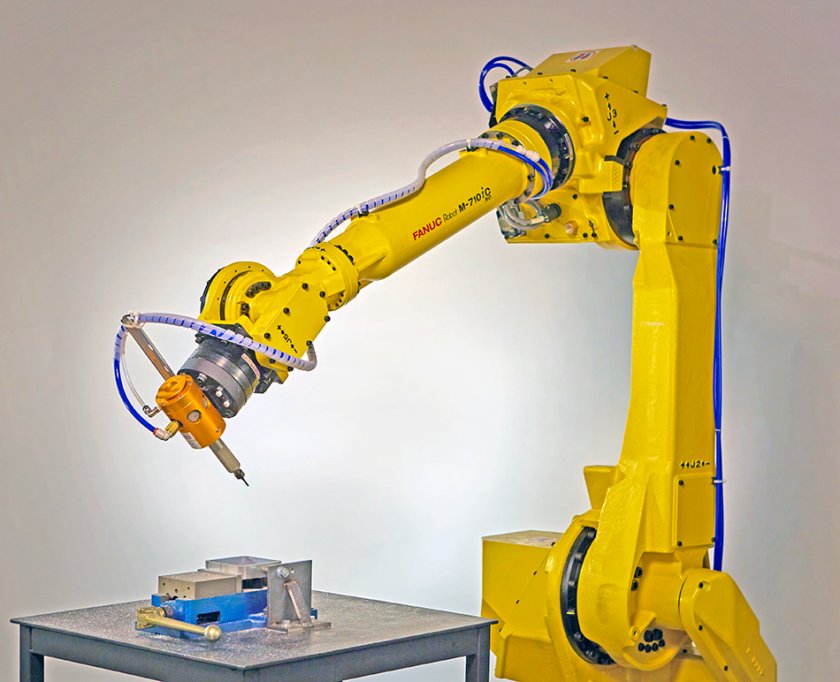
Les fabricants cherchent toujours à augmenter leur productivité et à réduire leurs coûts. L’automatisation des tâches d’assemblage qui sont effectuées manuellement peut offrir un grand potentiel d’augmentation de l’efficacité, mais pose plusieurs défis. Traditionnellement, les robots sont contrôlés en les programmant pour suivre une trajectoire souhaitée. La moindre variation dans la géométrie de la pièce peut donner des résultats insatisfaisants et endommager la pièce et l’outillage. Certaines tâches d’assemblage complexes, telles que l’insertion d’arbres à cames dans des blocs moteurs, exigent de l’assembleur qu’il « sente » la position d’assemblage correcte. Les robots seuls ne peuvent pas mesurer et compenser avec précision les forces de contact subies au cours de ces tâches d’assemblage.
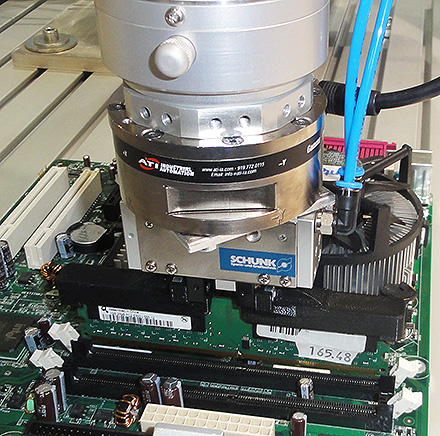
Les capteurs de force/couple (F/T) à six axes d’ATI Industrial Automation et les robots universels peuvent maintenant accomplir une variété de tâches d’assemblage difficiles en utilisant le contrôle de la force. Les capteurs F/T d’ATI offrent un haut niveau de sensibilité, envoyant au robot des informations extrêmement précises sur la force ou le couple appliqué, lui permettant de réagir de manière appropriée. Ce retour d’information sur le contrôle de la force permet au robot de « sentir » la pièce, ce qui minimise le risque de dommages. Les tâches d’assemblage de précision qui sont effectuées manuellement ou qui s’avèrent trop difficiles à automatiser peuvent désormais être réalisées à l’aide du contrôle de la force, ce qui permet d’augmenter considérablement la qualité et le rendement de la production, tout en créant un environnement de travail plus sûr en éliminant les problèmes ergonomiques associés aux tâches d’assemblage manuel difficiles. L’assemblage d’engrenages, l’insertion d’arbres à cames ou de pistons, l’assemblage électronique, les tests de cycle de vie, la vérification du poids et l’haptique ne sont que quelques-unes des applications qui peuvent être réalisées à l’aide de robots universels équipés de capteurs de force/couple à six axes d’ATI.
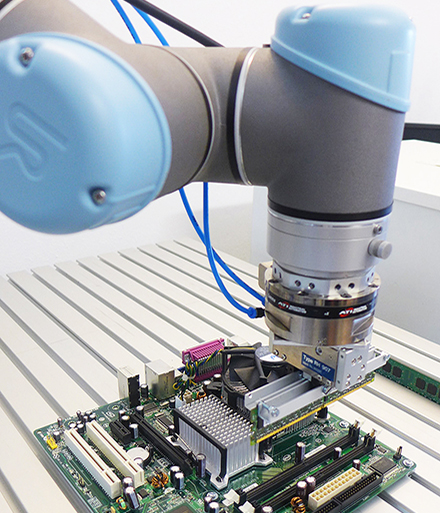
Une application de démonstration a été récemment développée en utilisant le système Net F/T d’ATI et un robot universel UR5 communiquant via Modbus sur Ethernet. La programmation du robot a été réalisée dans ses propres langages Polyscope et Script. Il a utilisé la Netbox d’ATI et le capteur de force/couple à six axes de la série Gamma pour relayer les données à l’extrémité du bras du robot.
Pour plus d’informations sur les capteurs de force/couple à six axes d’ATI, cliquez ici.