Lorsqu’il s’agit d’exploration spatiale, le célèbre entrepreneur technologique et philanthrope Elon Musk déclare : « Il faut être inspiré par les choses. Vous voulez vous réveiller le matin et penser que l’avenir sera formidable – et c’est ce que signifie être une civilisation spatiale. Il s’agit de croire en l’avenir et de penser que l’avenir sera meilleur que le passé. Et je ne vois rien de plus excitant que d’aller dans l’espace et d’être parmi les étoiles »
La possibilité d’être meilleur à l’avenir est une ambition qui anime de nombreux acteurs de l’industrie technologique. Pour ATI Industrial Automation, il s’agit d’un aspect fondamental de sa culture d’entreprise qui souligne le développement de ses produits. Les effecteurs robotiques d’ATI sont utilisés dans une grande variété d’applications, allant des températures extrêmes aux environnements chimiques difficiles. Son équipe d’ingénieurs est fière de proposer des solutions créatives aux défis de la fabrication et de l’automatisation, et elle a maintenant l’occasion de se montrer à la hauteur de la situation dans l’espace
ATI a contacté les Jet Propulsion Laboratories (JPL) de la NASA pour leur proposer de développer un capteur de force/couple sur mesure pour Perseverance, le dernier projet de rover pour Mars 2020. Le JPL est la principale entité de recherche américaine pour l’exploration robotique de notre système solaire et gère le Deep Space Network de la NASA, le système de télécommunications le plus performant de la planète. La mission Mars 2020 est le fruit d’une collaboration entre la NASA, le JPL et de nombreuses autres organisations chargées de développer de nouvelles technologies pour explorer la surface de Mars.


L’objectif de cette mission, qui s’inscrit dans le cadre du programme d’exploration de Mars de la NASA, est de découvrir la planète rouge par une expérience directe. Ce projet a un programme chargé qui comprend la recherche de signes de vie microbienne ancienne, la catégorisation du climat et de la géologie de Mars pour aider à déterminer l’existence de conditions habitables, la récupération d’échantillons de la surface de la planète et, sans doute l’objectif le plus excitant de cette mission, la préparation de l’exploration humaine de Mars.
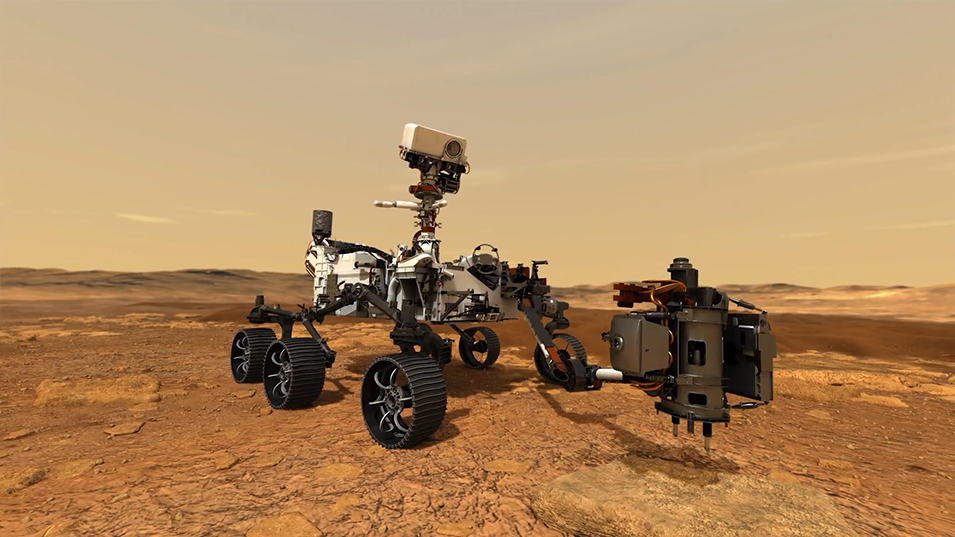
Le rover Persévérance est un véhicule robotisé non habité de la taille d’une voiture. Au cours de son exploration, il collectera et indexera de petits échantillons de roche et de sol dans des endroits privilégiés. Une fois à bord, les tubes d’échantillonnage sont conservés à l’intérieur du rover en vue d’un éventuel retour sur Terre.
Il était clair que le JPL avait besoin d’un système automatisé pour collecter et manipuler le matériel spatial, ainsi que pour le faire passer par le processus d’indexation. Pour ce faire, les ingénieurs ont mis au point l’Adaptive Caching Assembly, une application qui ressemble à une opération de prélèvement et de placement que l’on trouve couramment dans une usine. La mise au point des systèmes et des composants nécessaires à la mission du Rover constituait un défi de taille à relever.
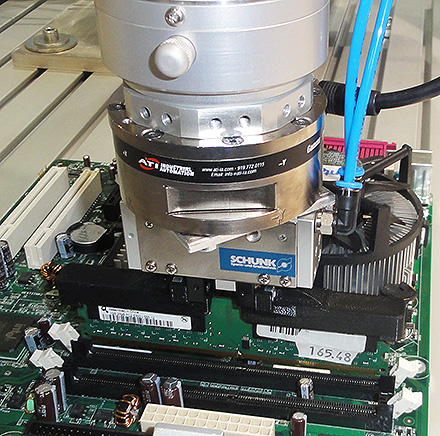
Le sous-système de collecte d’échantillons se compose de l’ensemble adaptatif de collecte, un grand bras robotique équipé d’une perceuse et d’un assortiment de forets utilisés pour collecter des échantillons dans des zones désignées à la surface de Mars. Une fois les échantillons collectés, un petit bras robotisé, appelé Sample Handling Assembly (SHA), les inspecte et les scelle dans le laboratoire embarqué du rover. Un capteur de force/couple (F/T) ATI intégré dans l’ensemble de l’effecteur SHA améliore la réactivité. Grâce à la détection de force d’ATI, le SHA est équipé pour manœuvrer facilement dans l’espace de travail restreint et effectuer des tâches exigeantes avec une grande précision.


Ce sous-système émule les processus automatisés que l’on trouve dans les secteurs de l’agriculture et de la fabrication, où les robots sont utilisés pour rendre les opérations répétitives plus précises. Les capteurs Force/Couple d’ATI sont souvent utilisés avec des robots dans ces types d’applications pour permettre un meilleur contrôle du processus et fournir une vérification du processus, par exemple en indiquant qu’une goupille est correctement insérée dans une fixation.
Certaines applications telles que les fonderies et les raffineries requièrent des considérations environnementales inhabituelles pour lesquelles ATI a développé des capteurs spécialisés. Cependant, rien n’est comparable aux conditions attendues dans le cadre de la mission Mars 2020, où les températures de surface inférieures à zéro et les terrains accidentés sont typiques. Avant d’atterrir sur Mars, le rover et ses sous-systèmes doivent survivre au lancement initial de la fusée Atlas 5.
Afin de fournir une solution de détection de force robuste pour le projet Perseverance, ATI a adapté sa technologie de capteur de force/couple pour compenser la large gamme de conditions environnementales. Le capteur de force/couple d’ATI, calibré pour l’espace, bénéficie d’une nouvelle conception qui assure la redondance du signal et compense les variations de température, garantissant ainsi une résolution précise des forces et des couples tout au long de la mission. Ce capteur est calibré thermiquement et il a été prouvé qu’il fonctionne de manière optimale dans un spectre de températures extrêmes. Pour développer et tester ces caractéristiques révolutionnaires, l’équipe d’ingénieurs d’ATI a conçu un équipement d’étalonnage spécialisé et a assuré une surveillance 24 heures sur 24 des essais du produit.
Des composants fabriqués à partir de matériaux thermiquement stables et à faible dégazage ont été ajoutés pour renforcer le capteur contre les fluctuations environnementales drastiques. Ces matériaux empêchent également la contamination croisée des échantillons au cours de la mission, ce qui est l’une des considérations les plus importantes du projet Mars 2020 Rover.
Après des années de développement, le très attendu rover Mars 2020 est entièrement assemblé et prêt à entamer sa mission. Perseverance devrait être lancé à la fin de l’été 2020 depuis Cap Canaveral, en Floride, et arrivera sur Mars en février 2021.
Au-delà des applications spatiales, le capteur de force/couple coté dans l’espace d’ATI permet un contrôle actif de la force pour les applications où les possibilités de réparation sont limitées ou dans des situations de vide poussé ou de variabilité extrême de la température.
Grâce à ce projet, ATI a développé une nouvelle technologie qui fera partie de l’histoire de la NASA et fournira des capteurs de force robustes et fiables pour des applications ici sur terre. La compensation de température, les composants thermiquement stables et la redondance supplémentaire des signaux profitent aux utilisateurs dans des industries telles que le démantèlement radioactif, le pétrole et le gaz, le moulage des métaux et les fonderies, ainsi que d’autres applications où les conditions dictent une utilisation continue dans des environnements extrêmes. ATI se réjouit de suivre Perseverance, le rover de Mars 2020 pendant sa mission et de découvrir les nouvelles applications innovantes qui utiliseront ce capteur de force/couple coté dans l’espace.
Pour des mises à jour récentes sur Perseverance Rover, cliquez ici.
Cliquez ici pour en savoir plus sur les capteurs de force/couple d’ATI.
Écoutez un épisode du podcast Robot Nation qui présente le JPL et ATI.