Traditionnellement, les chirurgiens s’appuient sur une combinaison d’expérience, de mémoire musculaire et de sens du toucher pour déterminer instinctivement les outils et les techniques adéquats pour exécuter chaque procédure. Au fur et à mesure qu’ils effectuent de plus en plus d’opérations, ces instincts s’affinent. Lorsqu’un chirurgien s’installe sur la table d’opération et prend un outil, il a déjà déterminé l’emplacement correct de l’incision et les forces de contact nécessaires à l’exécution de la tâche.
La capacité d’un chirurgien à utiliser ses connaissances et son intuition pour réaliser des interventions fait de lui un expert très efficace et recherché dans son domaine. En faisant appel à leur expérience et à leurs sens, les chirurgiens opèrent littéralement au feeling et peuvent procéder à des ajustements en temps réel tout au long du processus. Apprendre à un robot à effectuer une tâche aussi complexe qu’une intervention chirurgicale sur un être humain est un défi, car ce type d’équipement d’automatisation présente des fonctionnalités très limitées. Un robot seul n’a pas de mémoire ni de sens et offre peu de possibilités en matière de contrôle dynamique ou d’assistance active. Avec une technologie comme les capteurs de force/couple d’ATI, les robots ont la capacité de sentir leur environnement et peuvent effectuer des tâches à plus grande valeur ajoutée.
L’université Vanderbilt abrite le laboratoire ARMA (Advanced Robotics and Mechanism Applications) dirigé par le professeur Nabil Simaan. Ce laboratoire fait partie de l’école d’ingénierie mécanique de l’université et se concentre sur la recherche robotique avancée pour les applications médicales. La recherche ARMA vise à déployer des chirurgies robotiques de manière à réduire l’inconfort du patient et le temps de récupération. L’un des moyens d’y parvenir consiste à établir un lien entre les chirurgiens à distance et les robots chirurgicaux dans le cadre de procédures peu invasives. Ils espèrent permettre un niveau plus élevé de soins aux patients en réduisant la variabilité de la chirurgie robotique.
Les robots chirurgicaux actuels dépendent fortement de l’intervention humaine : même si un robot déplace les outils et touche physiquement le patient, il a toujours besoin d’une « programmation » pour savoir quel outil utiliser, où le placer, quand couper, quelle force utiliser, etc. Le chirurgien gère toutes ces variables à distance, en plus d’exécuter la procédure elle-même, ce qui rend la chirurgie robotique fastidieuse.
Les chercheurs de l’ARMA s’efforcent de rendre les robots plus actifs afin d’aider les chirurgiens à combler le fossé qui les sépare. La rétro-ingénierie du sens du toucher du chirurgien a été un véritable défi pour eux. Les chirurgiens travaillent au toucher, ce qui signifie que les quantités exactes de forces de contact nécessaires à l’exécution des procédures sont inconnues. Le Dr Simaan et son équipe ont mis au point un modèle interactif qui permet de mesurer et de contrôler les forces de contact grâce au retour d’information des capteurs de force/couple (F/T) d’ATI Industrial Automation.
Le modèle qu’ils ont conçu interprète les informations sur les forces de contact recueillies lors d’une simulation de chirurgie robotique. L’application comprend un bras robotique DaVinci Research Kit et un capteur ATI F/T monté sur un « patient » en silicone. Pendant que le chirurgien exécute la procédure, les forces et les couples exercés par le robot sur la maquette en silicone sont capturés en temps réel, ce qui donne une idée de ce que vit un patient humain.
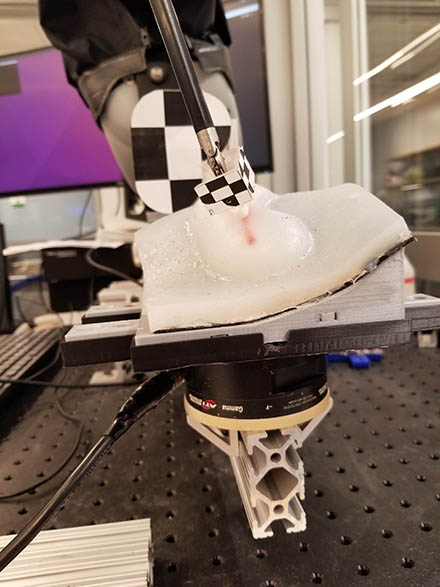
En réalité, il n’est pas possible de placer un capteur de force à l’intérieur du corps humain pour recueillir ces données. Toutefois, l’application ARMA constitue le chaînon manquant entre le chirurgien à distance et le patient lors de l’intervention. Grâce au développement d’un modèle de prévision, les chirurgiens peuvent comprendre l’impact du processus sur le corps. Les capteurs F/T d’ATI capturent simultanément les données des six degrés de liberté, ce qui permet d’obtenir des données de localisation très précises pour rendre les modèles réalistes. Les informations sont mises à jour en direct tout au long de la procédure simulée, tandis que le modèle s’adapte pour refléter les changements de force et de couple. Il en résulte un profil approfondi de l’impact des forces et des couples de la chirurgie sur le patient, qui permet de quantifier les forces de contact qui n’étaient auparavant connues qu’au feeling.
Comprendre exactement comment le robot interagit avec l’anatomie humaine en ce qui concerne les forces et les couples permet d’obtenir des fonctionnalités plus sophistiquées pour les robots chirurgicaux. Par exemple, le capteur F/T d’ATI pourrait être intégré du côté robot de l’application pour surveiller et contrôler les forces de contact pendant la chirurgie robotique. Avec un retour haptique, le capteur agit comme une fixation virtuelle pour les mains du chirurgien. Il permettrait au chirurgien de mieux se concentrer et d’éviter d’appliquer des forces excessives au patient. ARMA permet aux robots chirurgicaux de jouer un rôle plus actif dans le processus en tirant parti des technologies robotiques et de détection de force. Les données sur la force de contact fournies par les capteurs F/T d’ATI, combinées à la capacité des robots à effectuer des tâches exigeantes et de haute précision avec répétabilité, aident les chirurgiens à rester en contact pendant les opérations robotisées.
Cette recherche simplifie les procédures assistées par robot en aidant les chirurgiens et les prestataires de soins de santé à comprendre comment normaliser les chirurgies mini-invasives. L’identification des meilleures pratiques dans ces opérations améliorera les soins aux patients et l’accessibilité aux opérations, tout en réduisant le temps de récupération. Grâce aux capteurs F/T d’ATI, la recherche ARMA permet aux robots d’assister activement les chirurgies robotiques en reliant les chirurgiens à l’expérience du patient.
Pour plus d’informations sur le laboratoire ARMA (Advanced Robotics and Mechanism Applications), cliquez ici.
Pour plus d’informations sur les capteurs de force/couple d’ATI, cliquez ici.