Dans la nature, lorsqu’un oiseau, un insecte ou une chauve-souris prend son envol, cela semble simple et sans effort. Comprendre comment ces animaux génèrent de la portance et se déplacent dans l’air s’avère beaucoup plus complexe. Le professeur adjoint David Lentink dirige un groupe de chercheurs diplômés de l’université de Stanford qui utilisent les capteurs de force/couple de l’ATI pour percer ce mystère. L’équipe a inventé une « plate-forme de force aérodynamique » pour mesurer les forces aérodynamiques lors d’expériences de vol libre avec des oiseaux bien entraînés. Les expériences sont réalisées in vivo, ce qui signifie en latin « dans la vie » et indique que l’expérience est parallèle à un comportement naturel. Fait remarquable, la nouvelle méthode est « sans contact » et permet à l’oiseau de voler librement sans être gêné d’aucune manière par des instruments, ce qui la rend exceptionnellement respectueuse de l’animal.
La recherche sur le vol englobe l’étude de la structure des ailes, de leurs mouvements et de leurs interactions avec l’air. Les forces que les animaux génèrent pendant le vol pour rester en l’air et effectuer diverses manœuvres sont particulièrement intéressantes. Auparavant, ces forces devaient être mesurées indirectement sur la base de modèles théoriques et de champs d’écoulement mesurés, ou en attachant les animaux à un système de détection. Cependant, les attaches ne peuvent pas être utilisées pour les animaux d’ordre supérieur tels que les oiseaux, notamment parce que cela perturberait leur bien-être et leur comportement de vol naturel. D’un point de vue scientifique, une méthode de mesure de la force à l’aide d’une longe ne permet pas de décrire ce qui se passe réellement lorsque les animaux volent, ce qui entraîne une modélisation trompeuse et inexacte du comportement de vol. L’équipe de Lentink a étudié trois modèles couramment utilisés et a obtenu des résultats décevants. « Les trois modèles ont donné des résultats inférieurs à ceux que nous espérions et n’ont pas prédit la portance de manière fiable, ce qui montre qu’il faut travailler à l’amélioration des modèles », rapporte Diana Chin, étudiante diplômée à Stanford.

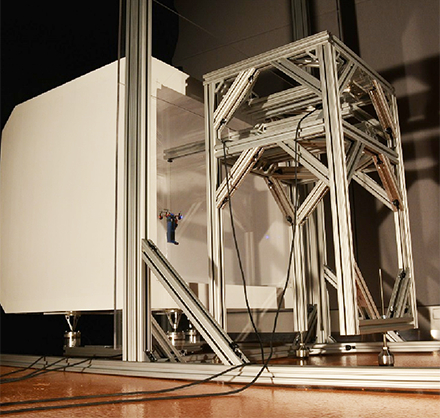
Plate-forme de forces aérodynamiques (AFP) de Stanford avec les capteurs de force/couple ATI Nano43 montés en haut et en bas
L’un des experts en vol résidant à Stanford est un perroquet du Pacifique nommé Obi. Comme tous les autres oiseaux du laboratoire Lentink, Obi a été dressé en utilisant uniquement le renforcement positif – pour voler à la demande. Lors d’expériences précédentes, Obi a volé à travers une feuille de laser saturée de petites particules de brume tout en portant des lunettes de protection laser sur mesure. Ces lunettes ont été conçues par un ancien étudiant diplômé, Eric Gutierrez, et ont servi à protéger Obi pendant les essais en vol. M. Gutierrez a pu reconstituer le champ d’écoulement autour des ailes d’Obi en enregistrant le mouvement des particules, en réponse aux battements d’ailes de l’oiseau, à l’aide de caméras à grande vitesse. Il a combiné ces mesures du champ d’écoulement avec des modèles aérodynamiques couramment utilisés pour obtenir des estimations de la force instantanée. Ces estimations ont ensuite été comparées aux mesures directes effectuées au cours d’une série distincte de vols de perroquets à l’intérieur de la plate-forme de forces aérodynamiques. Les comparaisons ont révélé la faible capacité de prédiction des modèles les plus répandus, soulignant ainsi la valeur des méthodes de mesure directe de la force.
Les forces aérodynamiques générées pendant le vol étant très peu connues, l’équipe de recherche de Stanford s’est trouvée confrontée à une tâche redoutable : il fallait trouver un moyen de mesurer des forces de portance faibles, mais changeant de manière dynamique, sans utiliser de filins. Il était impératif de créer un environnement plus naturel où ils pourraient entraîner un animal à voler sur commande et observer les forces générées par ses battements d’ailes. Ces objectifs sont devenus le catalyseur de la plate-forme de forces aérodynamiques et ont finalement conduit au développement de nouvelles expériences in vivo, qui ont mesuré directement la portance générée par un animal volant pour la première fois.
La plate-forme de forces aérodynamiques (AFP) est une chambre de vol fermée équipée de capteurs de force/couple Nano43 de l’ATI montés en haut et en bas. Pendant les vols sur l’AFP, les battements d’ailes créent des changements de pression dans l’air qui sont traduits par les capteurs Nano43 d’ATI en mesures de la force aérodynamique. La sensibilité et la précision des capteurs Nano43 étaient idéales pour mesurer les petites forces générées par les oiseaux dans la plate-forme de force aérodynamique, et le taux d’échantillonnage rapide était nécessaire pour résoudre les forces à l’intérieur des battements d’ailes », indique M. Chin Les capteurs ATI F/T fournissent un retour d’information sur la force à partir de six axes différents et enregistrent les changements au fur et à mesure qu’ils se produisent, c’est-à-dire, dans ce cas, à des vitesses très élevées. Les résultats de ces expériences offrent un aperçu plus complet des changements de pression dynamiques pendant le vol, ce qui n’était pas possible auparavant.

L’intégration par Stanford des capteurs de force/couple ATI à la plate-forme de forces aérodynamiques permet d’obtenir des données plus précises pour chaque essai en vol. L’AFP constitue une avancée considérable pour l’équipe et pour la recherche sur le vol ; l’association de cette nouvelle technologie à des expériences in vivo permet d’approfondir la connaissance de la mécanique du vol chez l’animal. Lentink, Chin, Gutierrez et le reste de l’équipe ont tiré des conclusions plus éclairées sur le vol des oiseaux qui feront progresser la technologie des robots volants. Grâce à ces techniques, l’équipe mettra au point des robots biomimétiques capables de participer à des missions de recherche et de sauvetage, d’assurer une surveillance dans des conditions dangereuses ou même de livrer des fournitures médicales.
Cliquez ici pour plus d’informations sur nos capteurs de force/couple.
Capteur de force/couple à six axes, modèle Nano43