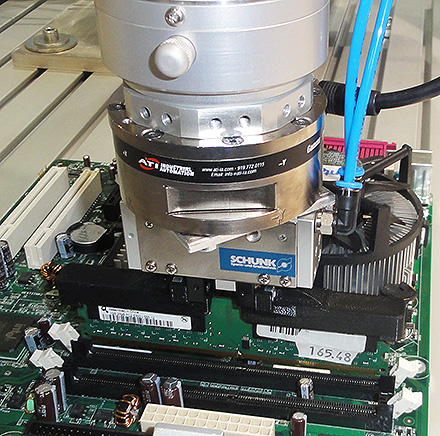

RoboSimian est un robot à plusieurs membres développé par le Jet Propulsion Laboratory (JPL) de la NASA. Ce robot unique a été conçu pour opérer dans des environnements trop dangereux ou difficiles pour l’intervention humaine, tels que les zones sinistrées et les marées noires. RoboSimian utilise des capteurs de force/couple ATI pour fournir des données précises, permettant un mouvement stable et permettant au robot d’appliquer la bonne pression aux objets qui l’entourent pendant qu’il se déplace. Il navigue sur le terrain en utilisant quatre capteurs de force/couple ATI à six axes dans les articulations du poignet et de la cheville, ce qui permet au robot de « sentir » le terrain lorsqu’il marche. Des caméras et des capacités LIDAR fournissent une carte en 3D, qui est renvoyée à l’opérateur. Ce dernier décide alors de la direction de RoboSimian. Après des années d’ingénierie en laboratoire, les chercheurs du JPL ont préparé RoboSimian à concourir au DARPA Robotics Challenge et à être utilisé dans des environnements nouveaux et complexes, des eaux profondes à l’espace extra-atmosphérique.
En fait, RoboSimian a participé au DARPA Robotics Challenge de juin 2015, un concours consistant en plusieurs tâches liées aux catastrophes que les robots doivent accomplir : conduire et sortir d’un véhicule, ouvrir une porte, découper un trou dans un mur, ouvrir une valve, traverser un champ de débris et monter des escaliers. Ces capacités sont précieuses, en particulier pour les opérations de sauvetage telles que la catastrophe nucléaire de Fukushima à Okuna, au Japon, en 2011 – une catastrophe qui aurait pu être minimisée en mettant en œuvre cette technologie pour tourner une vanne ou actionner un interrupteur de commande. Ces tâches simples ne pouvaient pas être effectuées par un humain en raison de la fuite de radiations émises par le réacteur endommagé.
Les chercheurs de RoboSimian au JPL développent actuellement les capacités de manipulation de la plateforme pour y inclure des mouvements bi-manuels – des actions qui requièrent deux mains travaillant ensemble à l’unisson. Ces capacités sont particulièrement utiles pour les travaux de déblaiement des décombres ou d’assemblage d’un treillis de construction. Les chercheurs envisagent de nombreuses utilisations potentielles de RoboSimian dans l’espace, notamment pour l’exploration ou l’assemblage en orbite. La plate-forme du robot pourrait également être utilisée dans des missions vers Mars ou d’autres astéroïdes. Une chose est sûre, les possibilités de RoboSimian et d’ATI sont très excitantes et stimulent l’imagination.
Pour plus d’informations sur les capteurs de force/couple à six axes d’ATI, cliquez ici.
Consultez un article sur RoboSimian ici.