Gli End-Effector di ATI possono far sì che il vostro robot diventi un vero fuoriclasse
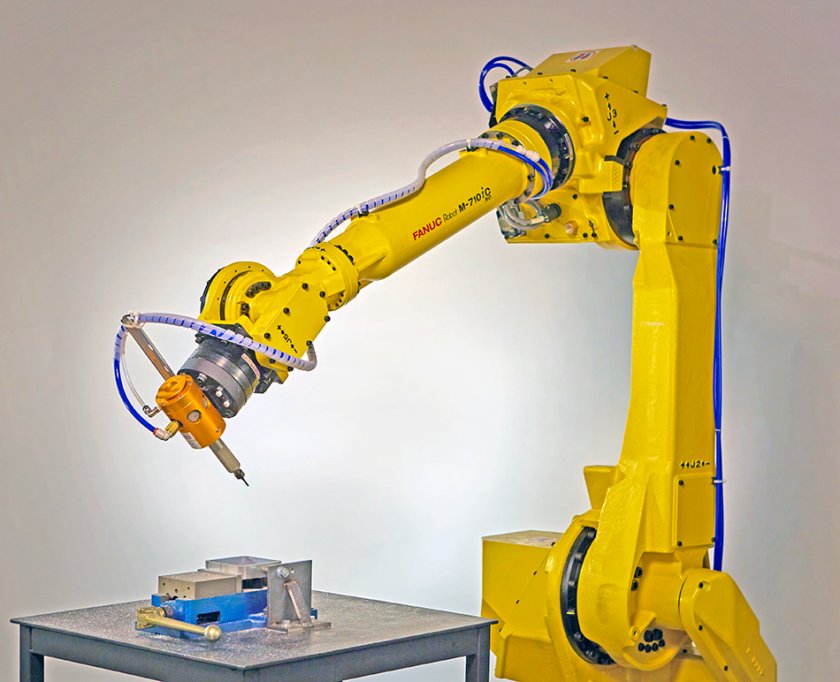
Productivity Automation Group (un integratore di sistemi autorizzato FANUC), con sede a Plymouth, MN, è specializzato in applicazioni per la lavorazione di macchine utensili e si concentra sulla fornitura di soluzioni innovative per aiutare i propri clienti a massimizzare gli sforzi di automazione. Utilizzando il cambio utensili QC-11 e l’utensile per la sbavatura a compressione radiale RCT-151 di ATI, insieme a una sonda Renishaw, hanno prodotto una dimostrazione che evidenzia la loro esperienza nell’aiutare i potenziali clienti a massimizzare la produttività dei robot già installati nelle loro strutture.
Gli ingegneri dell’automazione di Productivity sapevano che in molte applicazioni di assistenza alle macchine, come l’ispezione, la marcatura laser, la pulizia dei pezzi, la fusione e la forgiatura, il robot non viene utilizzato per la maggior parte del tempo. Hanno voluto dimostrare ai clienti la versatilità di un singolo robot, al di là del semplice carico e scarico dei pezzi. Incorporando una piattaforma di cambio utensile nelle loro celle robotizzate, hanno potuto espandere le capacità del robot e ridurre i tempi dei cicli di lavorazione.
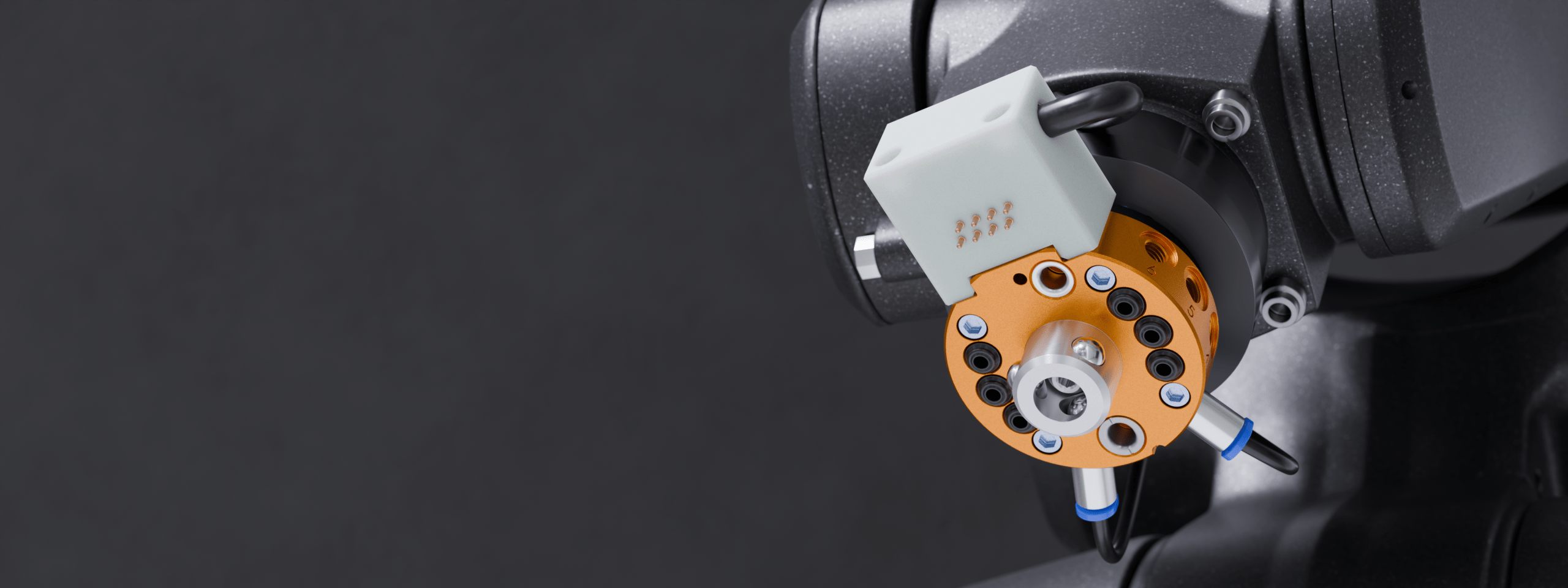
Riconosciuto per il suo design leggero e compatto, abbinato a un robusto meccanismo di bloccaggio ad alta resistenza, il cambio utensili QC-11 di ATI svolge un ruolo cruciale nella dimostrazione di Productivity, facilitando lo scambio rapido e automatico degli utensili robotici di fine braccio. Per migliorare ulteriormente la flessibilità del robot, i cambiautensili ATI possono essere configurati con un’ampia gamma di moduli di utilità aggiuntivi standard, che consentono di supportare diverse utilità e applicazioni di fine braccio.
La demo mostra il percorso di sbavatura generato con Fusion360 dopo che la sonda Renishaw è stata utilizzata per localizzare il pezzo e impostare un quadro utente per creare un percorso utensile da far seguire all’utensile di sbavatura RCT-151. Utilizzando tale cornice come coordinata di lavoro, hanno eseguito sul robot un percorso utensile generato dallo stesso software CAM del programma della macchina utensile per sbavare il pezzo, risparmiando ulteriore tempo di programmazione.
Aumentare le velocità di avanzamento con una qualità uniforme, indipendentemente dall’orientamento dell’utensile, è un lavoro semplice per l’utensile di sbavatura radialmente compatibile RCT-151 di ATI. Il design articolato a controllo pneumatico è ideale per la rimozione delle linee di separazione, in quanto consente alla punta di taglio di seguire il profilo del pezzo e di compensare le irregolarità della superficie, la posizione del pezzo e la ripetibilità del robot, mantenendo una forza costante che può essere controllata e regolata al volo.

I dispositivi finali di ATI e la sonda di Renishaw sul braccio robotico di FANUC consentono di passare senza soluzione di continuità dall’utilizzo della sonda per la raccolta dei dati alla sbavatura di precisione del pezzo, fino allo spostamento del pezzo e alla preparazione per ripetere il processo con una nuova unità. La facilità di completamento dell’operazione evidenzia come soluzioni di questo tipo possano far risparmiare tempo e manodopera, migliorando al contempo la stabilità del processo.
Volete ottenere di più dalle vostre applicazioni di manutenzione delle macchine? ATI e Productivity Inc. possono aiutare i vostri robot a fare di più per migliorare i vostri processi.
Contattate ATI per maggiori informazioni.
Cliccate qui per saperne di più su tutti i nostri cambiautensili robotizzati.
Cliccate qui per saperne di più su tutti i nostri utensili per l’asportazione di materiale.
Per saperne di più su Productivity Inc.