Tradizionalmente, i chirurghi dipendono da una combinazione di esperienza, memoria muscolare e senso del tatto per determinare istintivamente gli strumenti e le tecniche corrette per eseguire ogni intervento. Eseguendo un numero sempre maggiore di interventi, questi istinti si affinano. Quando un chirurgo si sposta sul tavolo operatorio e prende in mano uno strumento, ha già determinato la corretta posizione dell’incisione e le forze di contatto necessarie per portare a termine l’intervento.
La capacità del chirurgo di utilizzare le proprie conoscenze e il proprio intuito per eseguire gli interventi li rende altamente efficienti e ricercati esperti nei loro rispettivi campi. Utilizzando le loro esperienze e i loro sensi, i chirurghi operano letteralmente con il tatto e possono apportare modifiche in tempo reale lungo il percorso. Insegnare a un robot a svolgere un’attività complessa come l’intervento chirurgico su un essere umano è una sfida, poiché questo tipo di apparecchiatura di automazione presenta funzionalità molto limitate. Un robot da solo non ha memorie o sensi e offre poco in termini di controllo dinamico o assistenza attiva. Con una tecnologia come quella dei sensori di forza/coppia di ATI, i robot hanno la capacità di percepire l’ambiente circostante e possono svolgere attività a maggior valore aggiunto.
La Vanderbilt University ospita il laboratorio Advanced Robotics and Mechanism Applications (ARMA) diretto dal professor Nabil Simaan. Il laboratorio fa parte della Scuola di Ingegneria Meccanica dell’Università e si concentra sulla ricerca robotica avanzata per applicazioni mediche. La ricerca ARMA cerca di utilizzare gli interventi chirurgici robotici in modo da ridurre il disagio dei pazienti e i tempi di recupero. Un modo per farlo è creare un ponte tra i chirurghi remoti e i robot chirurgici nelle procedure minimamente invasive. Sperano di consentire un livello più elevato di assistenza ai pazienti riducendo la variabilità della chirurgia robotica.
I robot chirurgici di oggi si basano molto sull’input umano: anche se un robot muove gli strumenti e tocca fisicamente il paziente, ha bisogno di una “programmazione” per sapere quale strumento usare, dove posizionarlo, quando tagliare, quanta forza usare, ecc. Il chirurgo gestisce tutte queste variabili a distanza, oltre a eseguire l’intervento stesso, il che rende la chirurgia robotica noiosa.
I ricercatori dell’ARMA si sforzano di rendere i robot un partecipante più attivo per aiutare a colmare la disconnessione per i chirurghi. La reingegnerizzazione del senso del tatto di un chirurgo è stata una sfida non da poco. I chirurghi lavorano con il tatto, il che significa che non si conosce l’esatta quantità di forze di contatto necessarie per eseguire le procedure. Il dottor Simaan e il suo team hanno sviluppato un modello interattivo che consente di misurare e controllare le forze di contatto attraverso il feedback dei sensori di forza/coppia (F/T) di ATI Industrial Automation.
Il modello che hanno ideato interpreta le informazioni sulla forza di contatto raccolte da simulazioni di chirurgia robotica. L’applicazione comprende un braccio robotico DaVinci Research Kit e un sensore F/T ATI montato su un “paziente” in silicone. Mentre il chirurgo esegue l’intervento, le forze e le coppie esercitate dal robot sul mockup di silicio vengono acquisite in tempo reale, fornendo una visione di ciò che sperimenta un paziente umano.
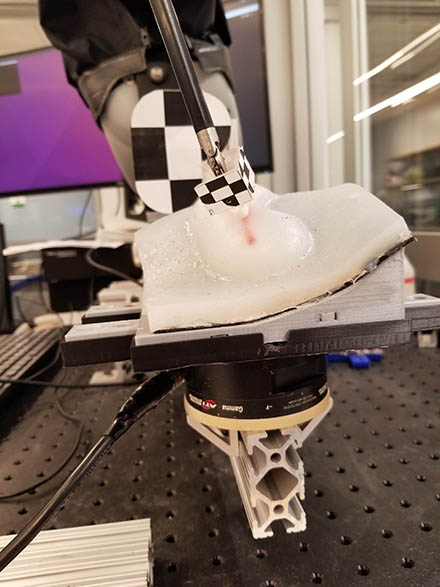
In realtà, non possiamo collocare un sensore di forza all’interno del corpo umano per raccogliere questi dati. Tuttavia, l’applicazione ARMA fornisce un collegamento mancante tra il chirurgo a distanza e il lato paziente della procedura. Grazie allo sviluppo di un modello di previsione, i chirurghi possono comprendere l’impatto del processo sul corpo. I sensori F/T di ATI acquisiscono i dati da tutti e sei i gradi di libertà simultaneamente, consentendo di ottenere dati di localizzazione estremamente accurati e precisi per la creazione di modelli realistici. Le informazioni vengono aggiornate in tempo reale durante la procedura simulata, mentre il modello si adatta per riflettere le variazioni di forza e coppia. Il risultato è un profilo approfondito del modo in cui le forze e le coppie dell’intervento chirurgico influiscono sul paziente, che aiuta a quantificare le forze di contatto che in precedenza erano note solo al tatto.
La comprensione esatta del modo in cui il robot interagisce con l’anatomia umana per quanto riguarda le forze e le coppie consente una funzionalità più sofisticata dei robot chirurgici. Ad esempio, il sensore F/T di ATI potrebbe essere integrato nel lato robot dell’applicazione per monitorare e controllare le forze di contatto durante la chirurgia robotica. Grazie al feedback aptico, il sensore funge da supporto virtuale per le mani del chirurgo. Ciò contribuirebbe a semplificare l’attenzione del chirurgo e a evitare l’applicazione di forze eccessive al paziente. ARMA consente ai robot chirurgici di assumere un ruolo più attivo nel processo, sfruttando le tecnologie robotiche e di rilevamento della forza. I dati sulla forza di contatto forniti dai sensori F/T di ATI, combinati con la capacità dei robot di eseguire compiti impegnativi e di alta precisione con ripetibilità, aiutano i chirurghi a rimanere in contatto durante gli interventi chirurgici robotici.
Questa ricerca semplifica le procedure assistite da robot aiutando i chirurghi e gli operatori sanitari a capire come standardizzare gli interventi chirurgici minimamente invasivi. L’identificazione delle migliori pratiche in questi interventi migliorerà l’assistenza ai pazienti e l’accessibilità alle operazioni, oltre a ridurre al minimo i tempi di recupero. Con i sensori F/T di ATI, la ricerca ARMA consente ai robot di assistere attivamente gli interventi chirurgici robotici, collegando i chirurghi all’esperienza del paziente.
Per ulteriori informazioni sul laboratorio Advanced Robotics and Mechanism Applications (ARMA), fare clic qui.
Per ulteriori informazioni sui sensori di forza/coppia dell’ATI, fare clic qui.