
SENSORI DI COLLISIONE
Selezione di un sensore di collisione
Come selezionare un modello di protettore
Per un’applicazione di successo, il Protector scelto deve essere dimensionato in modo appropriato. Per scegliere un modello, è necessario considerare i carichi prodotti dal peso statico dell’utensile, i carichi inerziali imposti dal movimento del robot e i carichi prodotti dal dispositivo finale durante l’esecuzione dei compiti previsti. Una volta calcolati questi carichi e scelto un modello specifico, è possibile determinare la pressione nominale per il punto di distacco. L’impostazione della pressione dell’aria richiesta deve essere prontamente disponibile con un’ampia possibilità di regolazione. Ad esempio, una pressione calcolata di 50 psi dovrebbe avere un intervallo regolabile di 25-75 psi.
Il processo di selezione è il seguente:
1. Calcolo dei carichi applicati:
La Figura 1 può essere utilizzata per convertire le forze che agiscono sull’utensile dell’end-effector nel momento, nella coppia e nei carichi assiali risultanti applicati al Protector. Utilizzare il diagramma mostrato nella Figura 1 e le formule seguenti per calcolare i carichi applicati nel caso peggiore per la propria applicazione. Tutti e tre i casi di carico – assiale, coppia e momento – devono essere valutati per le loro componenti di forza statica, dinamica e di lavoro.
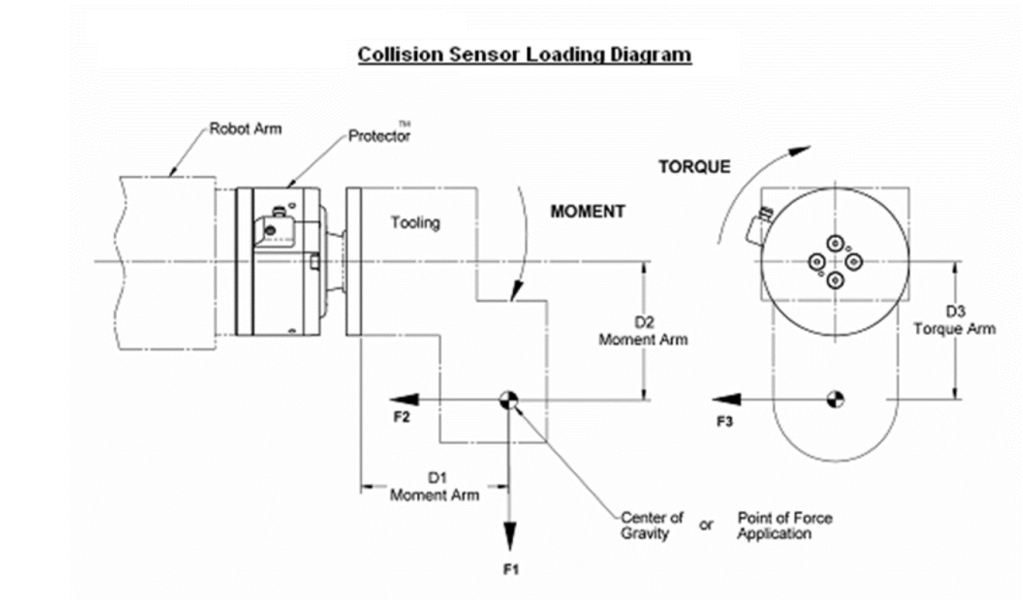
Formule:
Carico assiale (F) = F2
Coppia (T) = F3*D3
Momento (M) = √( (F1D1)2 + (F2*D2)2 )
(F1, F2 e F3 consistono nella somma delle rispettive componenti di forza statica, dinamica e di lavoro e devono sempre essere positive ai fini del calcolo delle impostazioni della pressione di distacco)
- Forza statica: Il carico applicato dal peso dell’utensile mentre il braccio del robot è inattivo. Include il peso di tutte le parti collegate al Protector, che agisce sul centro di gravità dell’assieme lungo la direzione di gravità.
- Forza dinamica: La forza inerziale imposta al centro di gravità dell’utensile a causa dell’accelerazione del braccio robotico. Questa forza agisce nella direzione opposta al movimento. Le forze dinamiche sono additive rispetto alle forze statiche e devono essere considerate attentamente per garantire il corretto dimensionamento della protezione.
- Forza di lavoro: Le forze che si generano sulla punta dell’utensile in condizioni di lavoro normali. Se queste forze e la loro posizione sono note, possono essere convertite in carichi sul Protector utilizzando la stessa tecnica.
Scegliere un modello di Protector:
Una volta noti i carichi approssimativi del primo passo, scegliere un modello che abbia un momento nominale e una coppia nominale superiori ai carichi calcolati sia in condizioni dinamiche che di lavoro.
3. Ottenere l’impostazione della pressione richiesta:
Per un determinato modello con carichi noti, l’impostazione della pressione richiesta può essere approssimata dalla seguente formula:
p = PM + PT + PF
Dove PM, PT e PF sono le componenti di pressione relative alle componenti di carico di momento, coppia e forza previste al distacco. PM, PT e PF sono calcolati con le formule riportate nelle tabelle seguenti, dove M, T e F sono i carichi previsti alla rottura della pressione impostata.
Tabella 1: Calcoli di impostazione della pressione del protettore
| Modello | Momento | Coppia | Assiale |
|---|---|---|---|
| SR-101 | (M x 0,0517) | (T x 0,0495) – 0,2 | F x 0,00228 |
| SR-131 | (M x 0,0183) | (T x 0,0199) – 0,1 | F x 0,00132 |
| SR-176 | (M x 0,0077) | (T x 0,0075) – 0,2 | F x 0,00070 |
| SR-221 | (M x 0,0032) | (T x 0,0040) + 0,5 | F x 0,00045 |
| SR-48 | (M x 1,0874) – 0,5 | (T x 0,9267) – 0,2 | F x 0,01435 |
| SR-61 | (M x 0,2294) – 0,2 | (T x 0,2708) – 0,4 | F x 0,00719 |
| SR-81 | (M x 0,1052) | (T x 0,1027) – 0,1 | F x 0,00361 |
| SR-82 | (M x 0,1052) | (T x 0,1027) – 0,1 | F x 0,00361 |
Esempio: Per un SR-81 con un momento di 100 lb-in, una coppia di 50 lb-in e un carico assiale di 20 lbs, e un’accelerazione di 2 G, la regolazione della pressione viene calcolata come segue:
P = ((100*0.172) – 0.2) + ((50*0.168) – 0.8) + (20*0.233) + ((100*2*0.172) – 0.2)
= 17 + 7.6 + 4.66 + 34.2
= 63.46
È richiesta una pressione nominale dell’aria di 63 psi.