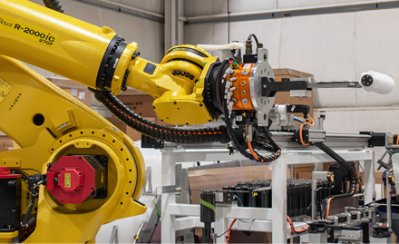

ロボシミアンは、NASAのジェット推進研究所(JPL)で開発された多肢ロボットである。このユニークなロボットは、災害現場や油流出事故など、人間が介入するには危険で困難な環境で活動するために設計された。ロボシミアンは、ATIフォース/トルク・センサを利用して正確なデータを提供することで、安定した動きを可能にし、ロボットが移動しながら周囲の物体に正しい圧力を加えることを可能にしている。手首と足首の関節にある4つのATI 6軸力/トルク・センサを使用して地形をナビゲートするため、ロボットは歩きながら地形を「感じる」ことができる。カメラとLIDAR機能により3Dマップが作成され、オペレーターに送信される。その後、オペレーターがロボシミアンの方向を決定する。JPLの研究者たちは、研究室での長年のエンジニアリングを経て、遠隔操作ロボシミアンをDARPAロボティクス・チャレンジに出場させ、深海から宇宙まで、新しい複雑な環境で使用できるように準備した。
実際、ロボシミアンは2015年6月に開催されたDARPAロボティクス・チャレンジに出場した。このロボティクス・チャレンジは、ロボットが実行すべきいくつかの災害関連タスクで構成されるコンテストで、車両の運転と脱出、ドアの開閉、壁の穴の切断、バルブの開閉、瓦礫の原野の横断、階段の昇降などを競った。これらの能力は、特に2011年の福島第一原子力発電所事故(奥名原発事故)のような救助作業では貴重なものである。これらの単純作業は、損傷した原子炉から放出される放射能漏れのために人間にはできなかった。
JPLのRoboSimian研究者たちは現在、このプラットフォームの操作能力を拡張し、バイ・マニュアル動作(両手が一体となって動作する必要がある動作)を追加しようとしている。このような能力は、瓦礫の撤去や建設用トラスの組み立てに特に役立つ。研究者たちは、探査や軌道上での宇宙空間での組み立てなど、ロボシミアンが宇宙で使用される多くの可能性を考えている。ロボットのプラットフォームは、火星や他の小惑星へのミッションにも使用できるだろう。ひとつ確かなことは、ロボシミアンとATIの可能性は非常にエキサイティングで、想像力をかき立てるということです。
ATI 6軸力/トルク・センサーの詳細については、こちらをご覧ください。
RoboSimianに関する記事はこちら。