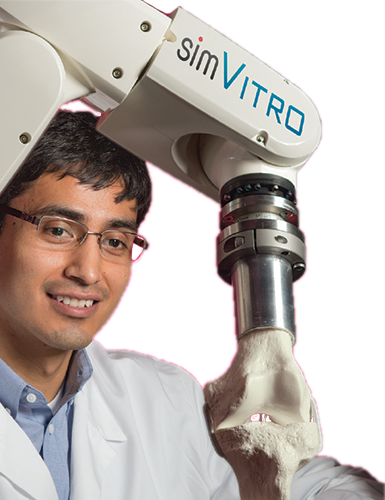
クリーブランド・クリニックのバイオロボティクス研究所は、ATI多軸力/トルク・センサを統合した、整形外科バイオメカニクス研究のための新しいロボティクス・テスト技術を開発し、販売を開始しました。simVITROとして知られるこのシステムは、身体がどのように設計されているか、整形外科用インプラントがどのように機能するか、外科的介入の潜在的な結果について新たな洞察を提供する。simVITROシステムは、ソフトウェア、ハードウェア、および統合サービスを組み合わせて、脊柱、膝、足/足首、股関節、肩、肘、手首などの主要な関節の体外シミュレーションが可能な、普遍的な筋骨格系シミュレーターを作成します。
リアルタイムフォースフィードバック制御は、simVITROの制御技術の中核です。ATIの多軸力/トルクセンサーの製品ラインは、simVITROシステムのニーズによくマッチしています。simVITROはハードウェアに依存しないため、多種多様なロボットと連動し、幅広い負荷を必要とする関節をテストすることができます。NanoからOmegaに至るATI製品ラインの幅広さは、手の小さな関節を関節運動させるのに必要な低荷重であろうと、膝や足の試験に必要な高荷重であろうと、力とトルクの制御に共通のソリューションを提供します。
2003年以来、BioRobotics研究室では、社内のすべてのロボット筋骨格系試験システムにATI力/トルクセンサを使用してきました。simVITROの製品化に伴い、ATI F/Tセンサはこれらのシステムの次世代に理想的な選択肢であることが示されました。クリーブランド・クリニックのバイオロボティクス研究所のロブ・コルブルン所長は、次のように述べています。”ATIとの協力から得られるメリットは、単に力/トルク・センサそのものだけでなく、信号調整ハードウェアとエンジニアリング製品サポートがすべて一体となって、simVITROのターンキー・ソリューションを提供してくれることです。”

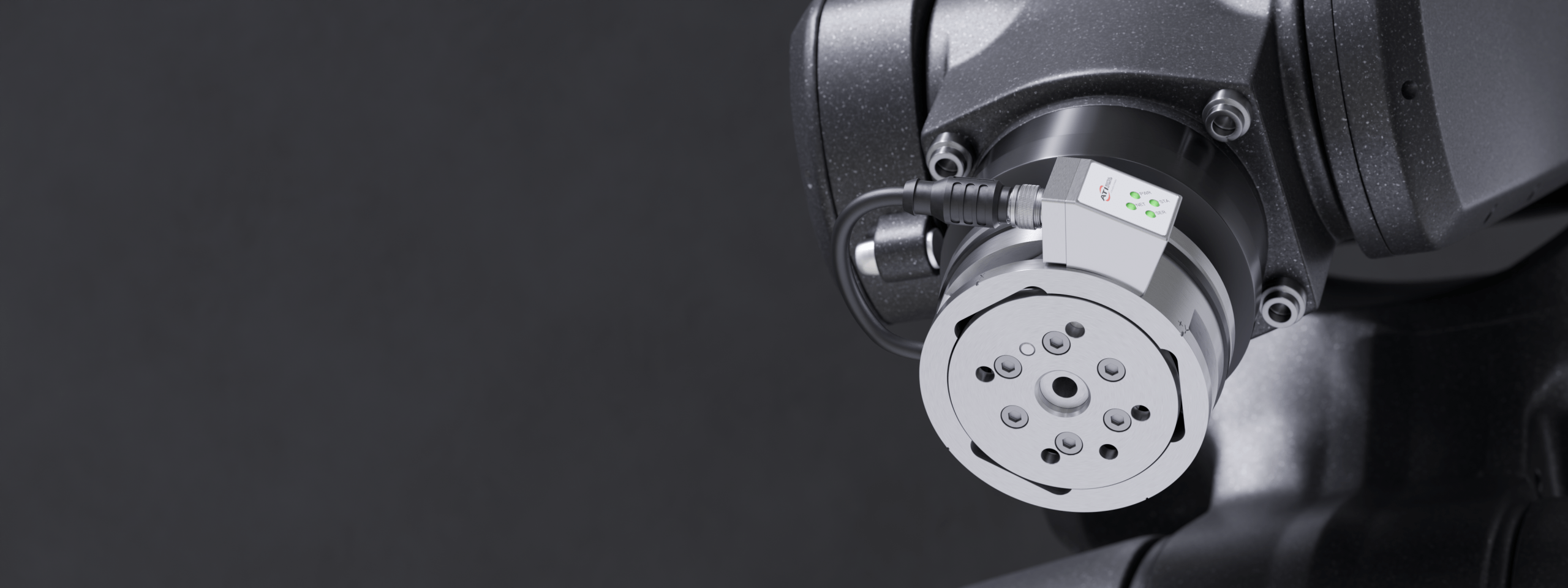
ATI多軸力/トルクセンサシステムは、力とトルクの全6成分を測定します。このシステムは、トランスデューサ、シールド付きハイフレックスケーブル、インテリジェントデータ収集システム、Ethernet/DeviceNetインターフェースまたはF/Tコントローラで構成されています。力/トルクセンサは、製品試験、ロボット組立、研削、研磨など、産業界全体で使用されています。研究分野では、ATI F/Tセンサーはロボット手術、ハプティクス、リハビリテーション、神経学、その他多くのアプリケーションで使用されています。
ATI力/トルクセンサについての詳細はこちら。
simVITROの詳細はこちら。





