自然界では、鳥や昆虫、コウモリが飛び立つとき、それは楽で単純に見える。これらの動物がどのようにして揚力を発生させ、空中を移動するのかを理解することは、はるかに複雑であることがわかります。デイビッド・レンティンク助教授が率いるスタンフォード大学の大学院研究者グループは、ATIのフォース/トルク・センサを使ってこの謎を解き明かしている。研究チームは、よく訓練された鳥を使った自由飛行実験で空力力を測定するための、いわゆる「空力プラットフォーム」を発明した。実験は生体内で行われる。これはラテン語で「生体内」を意味し、実験が自然に発生する行動と類似していることを示す。驚くべきことに、この新しい方法は “ノータッチ “であり、鳥が器具に一切負担をかけられずに自由に飛び回ることを可能にし、動物に非常に優しい方法となっている。
飛行研究は、翼の構造、翼の動き、空気との相互作用の研究を包含している。特に興味深いのは、動物が飛行中に空中に留まり、さまざまな操作を行うために発生する力である。以前は、これらの力は理論モデルや測定された流れ場に基づいて間接的に測定するか、動物をセンシングシステムに繋いで測定するしかなかった。しかし、鳥のような高次の動物には、特にその幸福や自然な飛行行動を乱すことになるため、テザーは使えない。科学的には、テザーによる力計測アプローチは、動物が飛ぶときに実際に起こっていることを描き出すことができず、飛行行動の誤解を招く不正確なモデリングになってしまう。レンティンクの研究チームは、一般的に使用されている3つのモデルを調査し、残念な結果を発見した。「スタンフォード大学の大学院生であるダイアナ・チンは、「3つとも私たちが期待したよりも悪い結果で、揚力を確実に予測することはできませんでした。

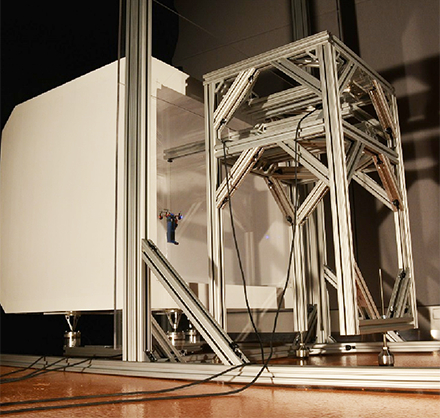
ATI Nano43フォース/トルク・センサを上下に取り付けたスタンフォードのエアロダイナミック・フォース・プラットフォーム(AFP)
スタンフォード大学に常駐する飛行の専門家の一人に、オビという名前のオウムがいる。レンティンク研究所の他の鳥と同様、オビは正の強化のみを用いて訓練された。以前の実験では、オビは特注のレーザー安全ゴーグルを装着したまま、小さな霧の粒子が飽和したレーザーシートの中を飛んだ。このゴーグルは元大学院生のエリック・グティエレスが設計したもので、飛行実験中オビの安全を守るために使用された。グティエレスは、鳥の翼の鼓動に反応する粒子の動きを高速カメラで記録することで、オビの翼の周りの流れ場を再構築することができた。彼はこれらの流れ場の測定値を一般的に使用されている空力モデルと組み合わせ、瞬間的な力の推定値を導き出した。そして、これらの推定値を、空力プラットフォーム内でオウムの飛行中に直接測定した値と比較した。比較の結果、一般的なモデルの予測能力が低いことが明らかになり、直接力測定法の価値がさらに浮き彫りになった。
飛行中に発生する空力力についてはほとんど知られていないため、スタンフォード大学の研究チームは困難な課題に直面した。また、動物を訓練して合図に合わせて飛行させ、その翼の動きによって発生する力を観察できるような、より自然な環境を作り出すことも不可欠だった。このような目的が、空力プラットフォーム開発のきっかけとなり、最終的には、飛行動物が発生させる揚力を初めて直接測定する新しいin vivo実験の開発につながった。
エアロダイナミック・フォース・プラットフォーム(AFP)は密閉された飛行チャンバーで、上部と下部にATIのNano43フォース/トルク・センサが取り付けられています。AFPでの飛行中、翼の動きによって空気中の圧力変化が生じ、ATIのNano43センサーによって空気力学的な力の測定に変換される。Nano43センサーの感度と精度は、Aerodynamic Force Platformで鳥が発生させる小さな力を測定するのに理想的でした。ATI F/Tセンサーは6つの異なる軸から力のフィードバックを提供し、その変化を記録します。これらの実験からの出力は、以前は不可能であった飛行中の動的な圧力変化をより包括的に見ることができます。

スタンフォード大学は、ATI力/トルクセンサを空力プラットフォームと統合することで、各飛行試験からより正確なデータを取得しています。AFPはチームにとって、また飛行研究にとっても大きなブレークスルーである。この新技術とin vivo実験を組み合わせることで、動物の飛行力学をより深く知ることができる。レンティンク、チン、グティエレス、そしてチームの他のメンバーは、鳥の飛行についてより多くの情報に基づいた結論を導き出し、それは飛行ロボットの技術を進歩させるだろう。これらの技術により、チームは、捜索救助任務の支援、危険な状況下での監視、あるいは医療物資の運搬が可能なバイオミメティック・ロボットを開発する予定である。
力/トルクセンサについての詳細はこちらをクリックしてください。
Nano43モデル 6軸力/トルクセンサ