
衝突センサー
衝突センサーの選択
プロテクターモデルの選び方
アプリケーションを成功させるためには、適切なサイズのプロテクターを選択する必要があります。モデルを選択するには、ツーリングの静的重量によって生じる荷重、ロボットの動きによって生じる慣性荷重、およびエンドエフェクターが意図したタスクを実行する際に生じる荷重を考慮します。これらの荷重が計算され、特定のモデルが選択されると、離脱ポイントの公称圧力設定が決定されます。必要な空気圧設定は、十分な調節が可能で、すぐに利用できるものでなければなりません。例えば、計算上の圧力設定が50 psiの場合、調整可能な範囲は25~75 psiでなければなりません。
選択プロセスは以下の通りです:
1.適用荷重を計算する:
図1を使用して、エンドエフェクター工具に作用する力を、プロテクターにかかるモーメント、トルク、アキシャル荷重に変換することができます。図1に示す図と以下の式を使用して、アプリケーションのワーストケースの適用荷重を計算してください。アキシャル荷重、トルク荷重、モーメント荷重の3つの荷重ケースは、静荷重、動荷重、作業荷重の各成分について評価する必要があります。
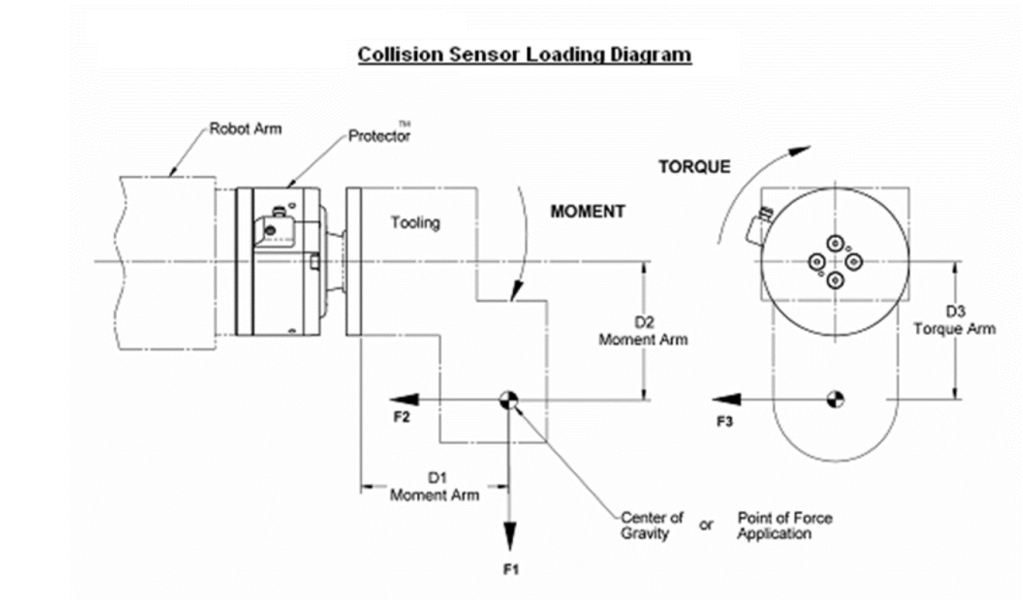
計算式
アキシアル荷重 (F) = F2
トルク (T) =F3*D3
モーメント (M) = √( (F1D1)2 + (F2*D2)2 )
(F1、F2、およびF3は、それぞれの静的力、動的力、および作業力コンポーネントの合計で構成され、ブレークアウェイ圧力設定を計算する目的では常に正でなければなりません)。
- 静的な力: ロボットアームがアイドル状態のときに、ツールの重量によって加えられる荷重。これにはプロテクタに取り付けられたすべての部品の重量が含まれ、アセンブリの重心で重力方向に沿って作用する。
- 動的な力: ロボットアームの加速によりツーリングの重心にかかる慣性力。この力は運動と反対方向に働く。動的な力は静的な力に加算されるため、プロテクタの適切なサイジングを確実にするために注意深く考慮する必要がある。
- 作業力:通常の作業条件下でツールチップに発生する力。これらの力とその位置がわかっていれば、同じ手法でプロテクタの荷重に変換することができます。
プロテクターモデルを選択します:
ステップ1でおおよその荷重がわかったら、動的条件と作業条件の両方で計算された荷重を上回る公称モーメントとトルク定格を持つモデルを選びます。
3.必要な圧力設定を得る:
負荷がわかっているモデルについて、必要な圧力設定は以下の式から概算できます:
P = PM + PT + PF
ここで、PM、PT、PFは、ブレークアウェイで予想されるモーメント、トルク、力の負荷成分に関連する圧力成分です。PM、PT、PFは以下の表の式で計算され、M、T、Fは設定圧力のブレークアウェイで予想される荷重です。
表1:プロテクター圧力設定の計算
| モデル | モーメント | トルク | アキシャル |
|---|---|---|---|
| SR-101 | (M x 0.0517) | (T x 0.0495) – 0.2 | F×0.00228 |
| SR-131 | (M x 0.0183) | (T x 0.0199) – 0.1 | F x 0.00132 |
| SR-176 | (M x 0.0077) | (T x 0.0075) – 0.2 | F x 0.00070 |
| SR-221 | (M x 0.0032) | (T x 0.0040) + 0.5 | F x 0.00045 |
| SR-48 | (M x 1.0874) – 0.5 | (T x 0.9267) – 0.2 | F x 0.01435 |
| SR-61 | (M x 0.2294) – 0.2 | (T x 0.2708) – 0.4 | F x 0.00719 |
| SR-81 | (M x 0.1052) | (T x 0.1027) – 0.1 | F x 0.00361 |
| SR-82 | (M x 0.1052) | (T x 0.1027) – 0.1 | F x 0.00361 |
例 モーメント100 lb-in、トルク50 lb-in、アキシャル荷重20 lbs、加速度2 GのSR-81の場合、設定圧力は以下のように計算されます:
P = ((100*0.172) – 0.2) + ((50*0.168) – 0.8) + (20*0.233) + ((100*2*0.172) – 0.2)
= 17 + 7.6 + 4.66 + 34.2
= 63.46
63psiの公称空気圧設定が必要です。