伝統的に外科医は、経験、筋肉記憶、触覚の組み合わせによって、各手術を実行するための正しい道具と手技を本能的に判断している。手術の回数を重ねるにつれて、これらの勘は細かく調整されるようになる。外科医が手術台に移動し、道具を手に取るまでに、彼らはすでに正しい切開位置と、作業を完了するために必要な接触力を決定している。
外科医は、知識と直感を駆使して手術を行うことができるため、非常に効率的で、各分野で引っ張りだこの専門家となる。経験や感覚を駆使することで、外科医は文字通り感覚で手術を行い、その過程でリアルタイムに調整を行うことができる。この種の自動化機器は機能が非常に限られているため、人間の手術のように複雑な作業をロボットに教えるのは難しい。ロボット単体には記憶も感覚もなく、動的な制御や能動的な支援はほとんどできません。ATIのフォース/トルク・センサーのような技術があれば、ロボットは環境を感じる能力を持ち、より付加価値の高い作業を行うことができる。
ヴァンダービルト大学には、ナビル・シマーン教授が所長を務めるARMA(Advanced Robotics and Mechanism Applications)ラボがある。この研究室は同大学機械工学部の一部であり、医療応用のための先端ロボット研究に重点を置いている。ARMAの研究は、患者の不快感や回復時間を減少させる方法でロボット手術を展開することを目指している。その方法のひとつが、低侵襲手術における遠隔地の外科医と手術ロボットの橋渡しである。ロボット手術のばらつきを減らすことで、より高度な患者ケアを可能にしたいと考えている。
今日の手術ロボットは、人間の入力に大きく依存している。ロボットがツールを動かし、患者に物理的に触れているとはいえ、どのツールを使うか、どこに置くか、いつ切るか、どのくらいの力を使うかなどを知るためには、「プログラミング」が必要だ。外科医は、手術そのものを実行するだけでなく、これらすべての変数を遠隔操作で管理するため、ロボット手術は退屈なものとなっている。
ARMAの研究者たちは、ロボットをより積極的な参加者にすることで、外科医の断絶を埋めようと努力している。外科医の触覚をリバースエンジニアリングすることは、彼らにとってかなりの挑戦だった。外科医は感覚を頼りに仕事をするため、手技の実行に必要な接触力の正確な量は未知数なのだ。シマーン博士と彼のチームは、ATIインダストリアル・オートメーションの力/トルク(F/T)センサーからのフィードバックにより、接触力を測定し制御できる対話型モデルを開発した。
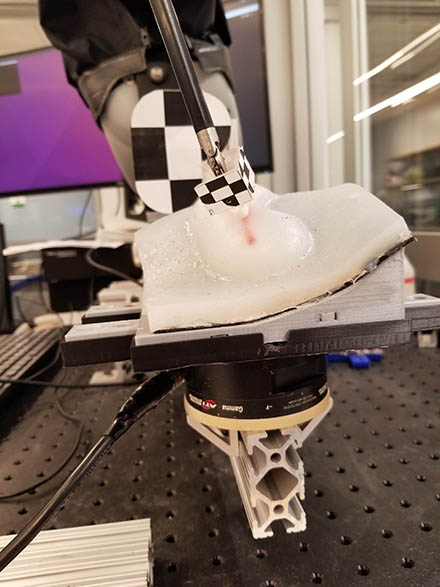
彼らが考案したモデルは、ロボット手術のシミュレーションから収集した接触力情報を解釈します。このアプリケーションには、ダヴィンチ・リサーチ・キットのロボットアームと、シリコン製の「患者」に取り付けられたATI F/Tセンサーが含まれています。外科医が手術を実行すると、ロボットがシリコンのモックアップに及ぼす力とトルクがリアルタイムでキャプチャされ、人間の患者が経験することへの洞察を提供する。
現実には、このデータを収集するために人体内に力センサーを設置することはできない。しかし、ARMAアプリケーションは、遠隔地の外科医と患者側との間に欠けているリンクを提供する。予測モデルの開発を通じて、外科医はプロセスが身体に与える影響を理解することができます。ATIのF/Tセンサーは、6つの自由度すべてから同時にデータを取得するため、高精度で正確な位置データにより、現実的なモデルをレンダリングできます。この情報は、モデルが力とトルクの変化を反映するように適応している間、シミュレーションされた手順の間中、ライブで更新されます。その結果、手術の力とトルクが患者にどのような影響を与えるかについての詳細なプロファイルが得られ、以前は感覚的にしか分からなかった接触力を定量化するのに役立ちます。
ロボットが力とトルクに関して人体構造とどのように相互作用するかを正確に理解することで、手術ロボットのより高度な機能が可能になる。例えば、ATIのF/Tセンサーをロボット側のアプリケーションに組み込むことで、ロボット手術中の接触力をモニターし、制御することができます。触覚フィードバックにより、センサーは外科医の手の仮想固定具として機能する。これは外科医の集中力を効率化し、患者に過剰な力が加わるのを防ぐのに役立つだろう。ARMAは、ロボット技術と力覚技術を活用することで、手術ロボットがプロセスにおいてより積極的な役割を担うことを可能にする。ATIのF/Tセンサーから得られる接触力データは、ロボットが要求の厳しい高精度の作業を繰り返し実行する能力と組み合わされ、ロボット手術中に外科医が常に連絡を取り合うのに役立ちます。
この研究は、外科医や医療提供者が低侵襲手術を標準化する方法を理解することで、ロボット支援手術を簡素化します。このような手術におけるベストプラクティスを特定することで、患者ケアと手術へのアクセスを改善し、回復時間を最小限に抑えることができる。ATIのF/Tセンサーにより、ARMAの研究は、外科医と患者の経験を結びつけることで、ロボットが積極的にロボット手術を支援することを可能にする。
Advanced Robotics and Mechanism Applications (ARMA) Labの詳細については、ここをクリックしてください。
ATIのフォース/トルク・センサーの詳細については、ここをクリックしてください。





