Tradicionalmente, os cirurgiões dependem de uma combinação de experiência, memória muscular e seu senso de tato para determinar instintivamente as ferramentas e técnicas corretas para executar cada procedimento. À medida que realizam mais e mais cirurgias, esses instintos se tornam mais afinados. Quando o cirurgião vai para a mesa de operação e pega uma ferramenta, ele já determinou o local correto da incisão e as forças de contato necessárias para concluir a tarefa.
A capacidade de um cirurgião de usar seu conhecimento e intuição para realizar procedimentos os torna altamente eficientes e procurados como especialistas em seus respectivos campos. Usando suas experiências e seus sentidos, os cirurgiões literalmente operam pelo tato e podem fazer ajustes em tempo real ao longo do processo. Ensinar um robô a realizar uma tarefa tão complexa quanto uma cirurgia em um ser humano é um desafio, pois esse tipo de equipamento de automação tem funcionalidade muito limitada. Um robô por si só não tem memória nem sentidos e oferece pouco em termos de controle dinâmico ou assistência ativa. Com tecnologias como os sensores de força/torque da ATI, os robôs têm a capacidade de sentir seu ambiente e podem executar tarefas de maior valor agregado.
A Universidade de Vanderbilt abriga o Advanced Robotics and Mechanism Applications (ARMA) Lab, dirigido pelo professor Nabil Simaan. O laboratório faz parte da Escola de Engenharia Mecânica da Universidade e se concentra em pesquisas avançadas de robótica para aplicações médicas. A pesquisa do ARMA busca implementar cirurgias robóticas de forma a diminuir o desconforto do paciente e o tempo de recuperação. Uma maneira de fazer isso é estabelecer uma ponte entre cirurgiões remotos e robôs cirúrgicos em procedimentos minimamente invasivos. Eles esperam possibilitar um nível mais alto de atendimento ao paciente, reduzindo a variabilidade na cirurgia robótica.
O robô cirúrgico atual depende muito da contribuição humana: mesmo que um robô esteja movendo as ferramentas e tocando fisicamente o paciente, ele ainda precisa de “programação” para saber qual ferramenta usar, onde colocá-la, quando cortar, quanta força usar etc. O cirurgião gerencia todas essas variáveis remotamente, além de executar o procedimento em si, o que torna a cirurgia robótica tediosa.
Os pesquisadores da ARMA se esforçam para tornar os robôs participantes mais ativos para ajudar a diminuir a desconexão dos cirurgiões. A engenharia reversa do sentido do tato de um cirurgião tem sido um grande desafio para eles. Os cirurgiões trabalham pelo tato, o que significa que as quantidades exatas de forças de contato necessárias para executar os procedimentos são desconhecidas. O Dr. Simaan e sua equipe desenvolveram um modelo interativo que permite que as forças de contato sejam medidas e controladas por meio do feedback dos sensores de força/torque (F/T) da ATI Industrial Automation.
O modelo que eles criaram interpreta as informações de força de contato coletadas de uma cirurgia robótica simulada. O aplicativo inclui um braço robótico DaVinci Research Kit e um sensor F/T da ATI montado em um “paciente” feito de silicone. À medida que o cirurgião executa o procedimento, as forças e os torques exercidos pelo robô na maquete de silicone são capturados em tempo real, fornecendo informações sobre as experiências de um paciente humano.
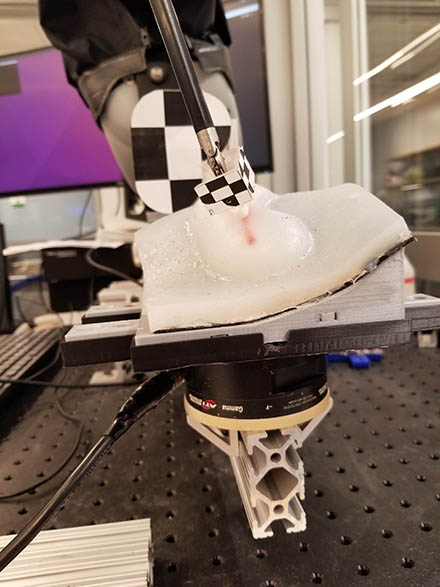
Na realidade, não podemos colocar um sensor de força dentro do corpo humano para coletar esses dados. No entanto, o aplicativo ARMA fornece o elo que faltava entre o cirurgião remoto e o lado do paciente no procedimento. Por meio do desenvolvimento de um modelo de previsão, os cirurgiões podem entender o impacto do processo no corpo. Os sensores F/T da ATI capturam dados de todos os seis graus de liberdade simultaneamente, o que permite dados de localização altamente precisos e exatos para renderizar modelos realistas. As informações são atualizadas ao vivo durante todo o procedimento simulado, enquanto o modelo se adapta para refletir as mudanças na força e no torque. O resultado é um perfil detalhado de como as forças e os torques da cirurgia afetam o paciente, o que ajuda a quantificar as forças de contato que antes eram conhecidas apenas pela sensação.
Compreender exatamente como o robô interage com a anatomia humana em relação a forças e torques permite uma funcionalidade mais sofisticada dos robôs cirúrgicos. Por exemplo, o sensor F/T da ATI pode ser integrado ao lado do robô do aplicativo para monitorar e controlar as forças de contato durante a cirurgia robótica. Com feedback háptico, o sensor atua como um acessório virtual para as mãos do cirurgião. Isso ajudaria a otimizar o foco do cirurgião e evitaria que forças excessivas fossem aplicadas ao paciente. O ARMA permite que os robôs cirúrgicos assumam uma função mais ativa no processo, aproveitando as tecnologias robóticas e de detecção de força. Os dados de força de contato dos sensores F/T da ATI, combinados com a capacidade dos robôs de executar tarefas exigentes e de alta precisão com repetibilidade, ajudam o cirurgião a manter o contato durante as cirurgias robóticas.
Essa pesquisa simplifica os procedimentos assistidos por robôs, ajudando cirurgiões e profissionais de saúde a entender como padronizar cirurgias minimamente invasivas. A identificação das melhores práticas nessas cirurgias melhorará o atendimento ao paciente e a acessibilidade às operações, além de minimizar o tempo de recuperação. Com os sensores F/T da ATI, a pesquisa da ARMA permite que os robôs auxiliem ativamente as cirurgias robóticas, conectando os cirurgiões à experiência do paciente.
Para obter mais informações sobre o Advanced Robotics and Mechanism Applications (ARMA) Lab, clique aqui.
Para obter mais informações sobre os sensores de força/torque da ATI, clique aqui.