使用 ATI F/T 传感器和通用机械手的可能性
制造商一直在寻求提高生产率和降低成本。将手动执行的装配任务自动化,可为提高效率提供巨大潜力,但也带来了一些挑战。传统上,机器人是通过编程按照所需的轨迹进行控制的。零件几何形状的微小变化都可能导致不理想的结果,并造成零件和工具损坏。一些复杂的装配任务,如将凸轮轴插入发动机组,需要装配人员 “感觉 “到正确的装配位置。仅靠机器人无法准确测量和补偿这些装配任务中的接触力。
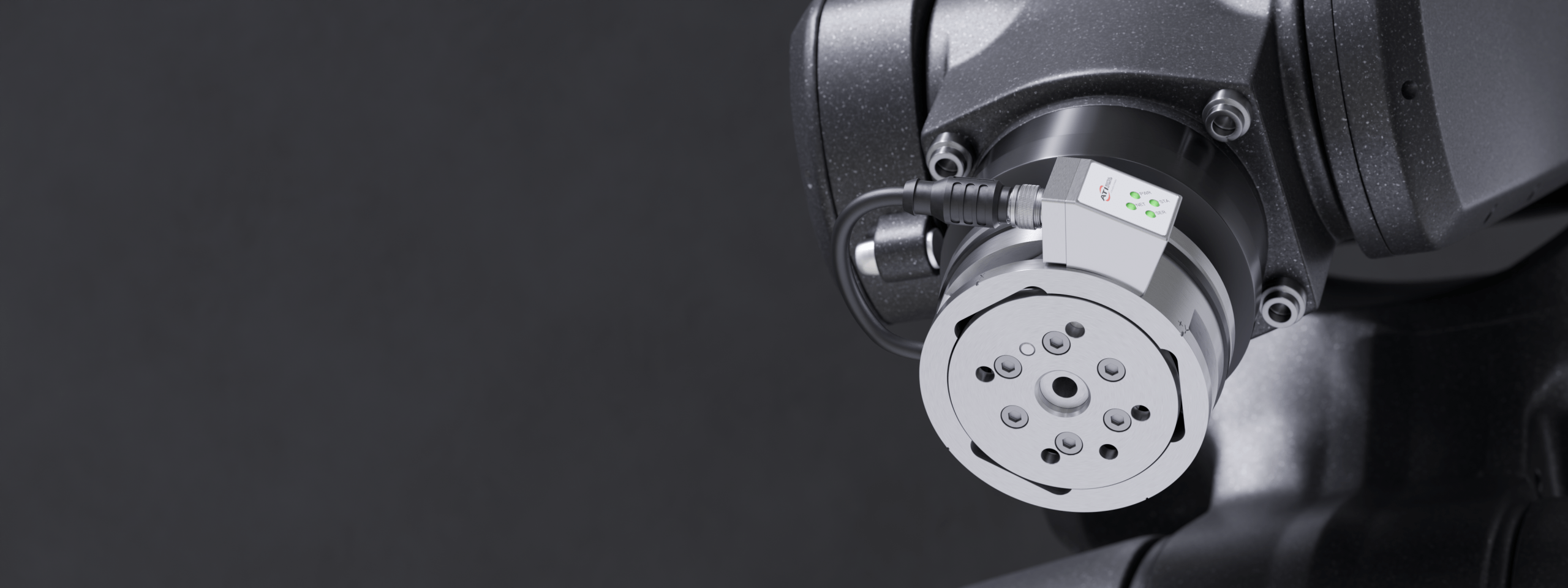
ATI 工业自动化公司的六轴力/力矩 (F/T) 传感器和通用机械手现在可以利用力控制完成各种困难的装配任务。ATI F/T 传感器具有高灵敏度,可向机器人发送极其准确的力或力矩信息,使机器人做出适当反应。这种力控制反馈使机器人能够 “感觉 “到工件,从而将损坏风险降至最低。现在可以使用力控制来执行手工操作或难以实现自动化的精密装配任务,从而大大提高生产质量和产量,同时通过消除与困难的手工装配任务相关的人体工程学问题,创造更安全的工作环境。齿轮装配、凸轮轴或活塞插入、电子装配、生命周期测试、重量验证和触觉,这些只是使用配备 ATI 六轴力/扭矩传感器的通用机器人可以完成的部分应用。
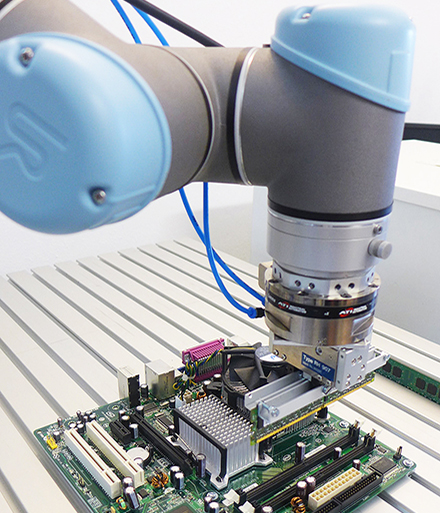
最近开发的一个示范应用利用了 ATI 的 Net F/T 系统和通过以太网 Modbus 通信的 UR5 通用机器人。机器人的编程是用它自己的 Polyscope 和脚本语言完成的。它使用 ATI 的 Netbox 和 Gamma 系列六轴力/扭矩传感器在机器人臂端传输数据。





