传统上,外科医生依靠经验、肌肉记忆和触觉的结合,本能地确定执行每项手术的正确工具和技术。随着手术次数越来越多,这些本能也会变得越来越敏锐。当外科医生走向手术台拿起工具时,他们已经确定了正确的切口位置和完成任务所需的接触力。
外科医生能够利用自己的知识和直觉来完成手术,这使他们在各自的领域成为高效、受人追捧的专家。外科医生利用自己的经验和感官,凭感觉进行操作,并能在操作过程中进行实时调整。教机器人执行像对人动手术这样复杂的任务具有挑战性,因为这类自动化设备的功能非常有限。机器人本身没有记忆或感官,几乎无法提供动态控制或主动辅助。有了 ATI 的力/力矩传感器等技术,机器人就能感知周围环境,执行更多增值任务。
范德堡大学是先进机器人和机械应用(ARMA)实验室的所在地,由 Nabil Simaan 教授领导。该实验室隶属于范德堡大学机械工程学院,专注于医疗应用领域的先进机器人研究。ARMA 研究旨在以减少病人不适和恢复时间的方式部署机器人手术。其中一种方法是在微创手术中架起远程外科医生和手术机器人之间的桥梁。他们希望通过减少机器人手术中的可变性,实现更高水平的患者护理。
如今的手术机器人在很大程度上依赖于人类的输入:尽管机器人在移动工具并接触病人,但它们仍然需要 “编程 “才能知道使用哪种工具、放在哪里、何时切割、使用多大的力量等。外科医生除了执行手术本身外,还要远程管理所有这些变量,这使得机器人手术变得乏味。
ARMA 的研究人员努力让机器人成为更积极的参与者,帮助外科医生弥补这种脱节。反向设计外科医生的触觉对他们来说是一个相当大的挑战。外科医生是凭感觉工作的,这意味着执行程序所需的接触力的确切量是未知的。Simaan 博士和他的团队开发了一个交互式模型,通过 ATI 工业自动化公司的力/力矩 (F/T) 传感器的反馈来测量和控制接触力。
他们设计的模型可以解释从模拟机器人手术中收集到的接触力信息。应用包括 DaVinci 研究套件机器人手臂和安装在硅制 “病人 “上的 ATI F/T 传感器。当外科医生执行手术时,机器人对硅模型施加的力和扭矩会被实时捕捉,从而让人了解人类病人的经历。
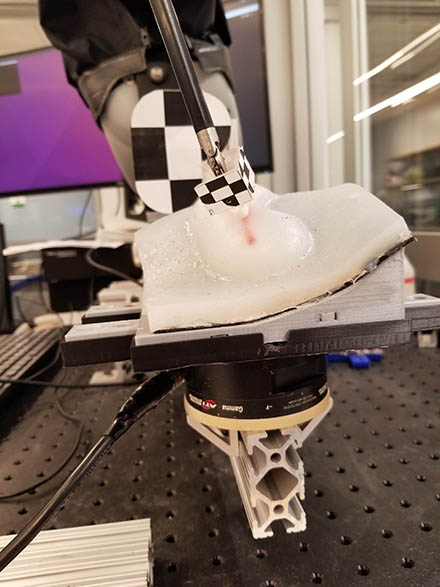
在现实中,我们无法在人体内部放置力传感器来收集这些数据。不过,ARMA 应用程序确实为远程外科医生和手术病人提供了一个缺失的环节。通过开发预测模型,外科医生可以了解手术过程对人体的影响。ATI 的 F/T 传感器可同时捕捉来自所有六个自由度的数据,从而获得高精度的精确定位数据,以渲染逼真的模型。在整个模拟过程中,这些信息都会实时更新,同时模型也会进行调整,以反映力和扭矩的变化。这样就能深入了解手术中的力和力矩对病人的影响,有助于量化以前只能凭感觉了解的接触力。
准确了解机器人与人体解剖结构在力和力矩方面的相互作用,可以使手术机器人实现更复杂的功能。例如,ATI 的 F/T 传感器可集成到机器人应用的一侧,以监测和控制机器人手术过程中的接触力。通过触觉反馈,传感器可充当外科医生双手的虚拟夹具。这将有助于简化外科医生的注意力,防止对病人施加过大的力。ARMA 利用机器人和力传感技术,让手术机器人在手术过程中发挥更积极的作用。来自 ATI F/T 传感器的接触力数据与机器人执行高要求、高精度、可重复性任务的能力相结合,有助于外科医生在机器人手术过程中保持接触。
这项研究通过帮助外科医生和医疗服务提供商了解如何实现微创手术的标准化,简化了机器人辅助手术。确定这些手术的最佳做法将改善病人护理和手术的可及性,并最大限度地缩短恢复时间。借助 ATI 的 F/T 传感器,ARMA 研究通过将外科医生与病人的体验联系起来,使机器人能够积极协助机器人手术。
有关先进机器人和机械应用(ARMA)实验室的更多信息,请点击此处。
有关 ATI 力/力矩传感器的更多信息,请点击此处。





