


产品特点
- 6 轴力/扭矩传感– 在所有六个自由度(Fx、Fy、Fz、Tx、Ty、Tz)上测量力和扭矩,力和扭矩范围高达 4000 N,适用于重型自动化和高负载任务
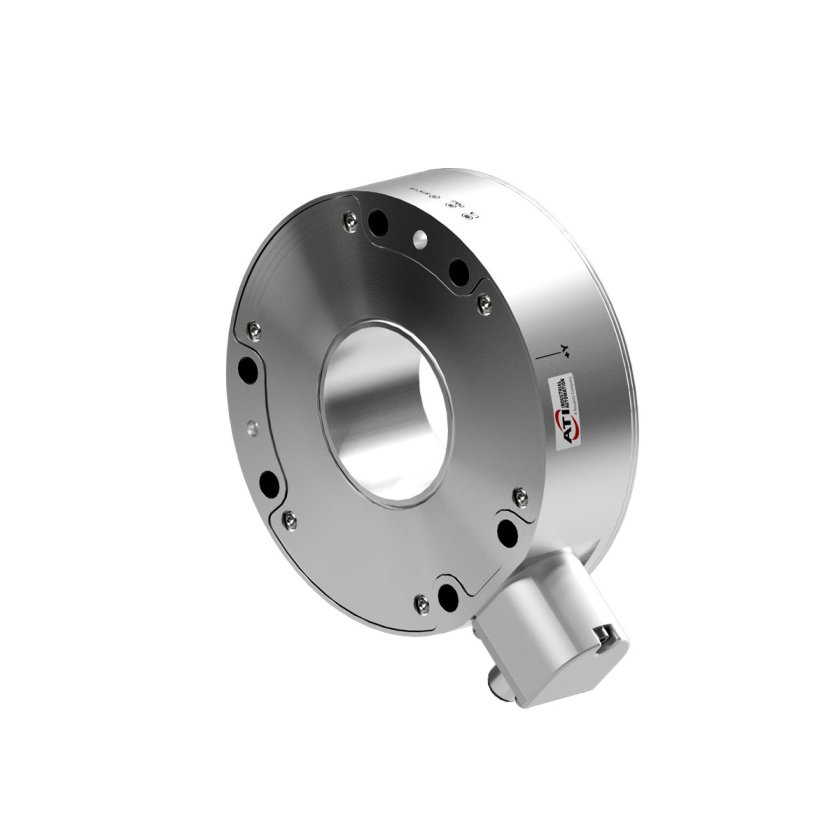
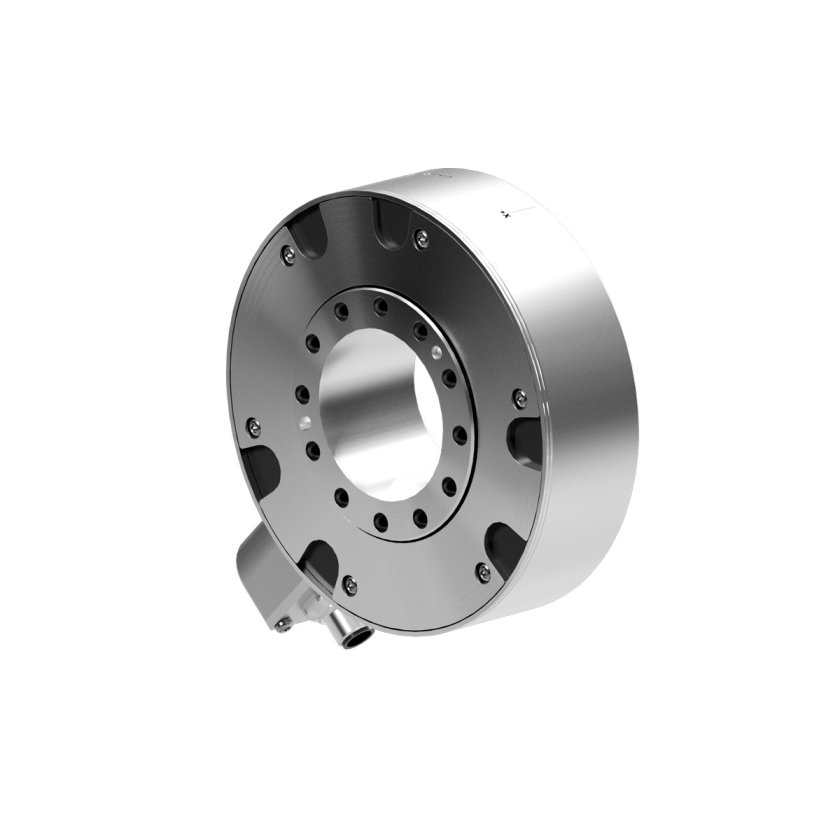
- 外形尺寸– 螺栓固定式设计降低了堆叠高度,50 毫米通孔使其成为空心腕式机器人应用的理想选择
- FANUC 软件兼容性– 与 FANUC Force Control 软件的原生集成提供了无缝集成和高效的数据传输
- FANUC 力/力矩传感器套件– 专为 FANUC 机器人设计,该套件包括兼容传感器、用于 BC100 螺栓孔型的接口板、电缆和电源。
- RS422 通信接口– 提供坚固耐用的高速串行通信,具有出色的抗噪能力,是长电缆和工业应用的理想之选。
- 超高强度– 采用高强度航空级铝材精密加工而成,坚固耐用,重量轻。可处理额定容量 5.0 至 6.0 倍的过载。
- 高信噪比– 硅应变片的信号强度是传统箔片应变片的 75 倍。信号经过放大后,噪声失真几乎为零。
- IP67 级浸水保护– 防尘并能承受临时浸水,可在潮湿或冲洗环境中可靠运行
| 规格 | 价值 |
|---|---|
| 测量范围 | 4000 N / 300 Nm |
| 感应范围 | |
| X/Y 力感应范围 | ±4000 N |
| X/Y 扭矩感应范围 | ±300 牛米 |
| Z 力感应范围 | ±6000 N |
| Z 扭矩感应范围 | ±300 牛米 |
| 决议 | |
| X/Y 力感应分辨率 | 0.4175 N |
| X/Y 扭矩感应分辨率 | 0.0175 牛米 |
| Z 力传感分辨率 | 0.4175 N |
| Z 扭矩感应分辨率 | 0.0175 牛米 |
| 超负荷 | |
| 力 X/Y 单轴过载 | ±20000 N |
| 力 Z 单轴过载 | ±30000 N |
| 扭矩 X/Y 单轴过载 | ±1500 牛米 |
| 扭矩 Z 单轴过载 | ±1500 牛米 |
| 刚度 | |
| 力 X/Y 计算刚度 | 1.5×10^8 牛/米 |
| 扭矩 X/Y 计算刚度 | 2.8×10^5 牛米/雷达 |
| 力 Z 计算刚度 | 2.2×10^8 牛/米 |
| 扭矩 Z 计算刚度 | 6.0×10^5 牛米/rad |
| 谐振频率 | |
| Fx/Fy/Tz 共振频率 | 2450 赫兹 |
| Fz/Tx/Ty 共振频率 | 1500 赫兹 |
| 其他 | |
| 高度 | 39.2 毫米 |
| 重量 | 1.88 千克 |
| 直径 | 130 毫米 |
| 接口板额定值 | IP67 |
| 通信接口 | RS422 |
| 精度(% 满刻度) | 2% |
| 延迟 | <1 ms |
| 采样率 | 8 千赫 |
| 连接器 | 8 针 M12 (ZC28) |
| 下载 | 说明 |
|---|---|
| AXIA130-M300 | AXIA130-M300 的 3C CAD 模型链接 |
- 筛选方式 部件编号
- 9105-CBL-S-G1-Q5F-WWPS1-1.5
- 9105-CKIT-ZC28-ZC28-5
- 9105-C-ZC28-MS-ZC51-4
- 9105-IP-2352
| 部件编号 | 说明 | ||
|---|---|---|---|
 |
9105-CBL-S-G1-Q5F-WWPS1-1.5 |
F/T 壁式安装电源,24 伏直流输出,国际插头 |
|
|
|
9105-CKIT-ZC28-ZC28-5 | 电缆套件,8 针 M12 Axia130 传感器至 8 针 M12,5 米,屏蔽外壳 |
|
|
|
9105-C-ZC28-MS-ZC51-4 |
电缆,8 针 M12 屏蔽外壳拆分为 5 针 M12 和屏蔽 FIO-JD6 |
|
|
|
9105-IP-2352 | 用于 Axia130 MAP 至 BC100 的接口板套件,(10)M8,(2)道钉 8 |
|
| 校准 | X/Y 力感应范围 | Z 力感应范围 | X/Y 扭矩感应范围 | Z 扭矩感应范围 | X/Y 力感应分辨率 | Z 力传感分辨率 | X/Y 扭矩感应分辨率 | Z 扭矩感应分辨率 |
|---|---|---|---|---|---|---|---|---|
| SI-4000-300 | 4000 N | 6000 N | 300 牛米 | 300 牛米 | 1.6667 N | 1.6667 N | 0.0699 牛米 | 0.0699 牛米 |
