

Recursos do produto
- sensorde força/torque de 6 eixos – Mede a força e o torque em todos os seis graus de liberdade (Fx, Fy, Fz, Tx, Ty, Tz) com faixas de até 2000 N de força e 125 Nm de torque para aplicações robóticas e industriais exigentes
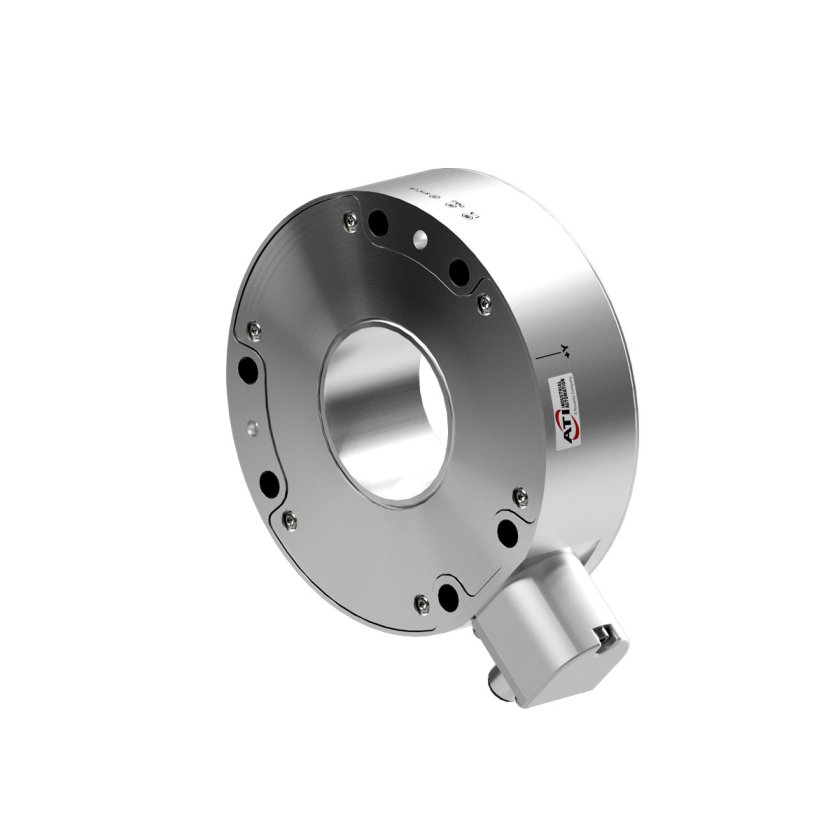
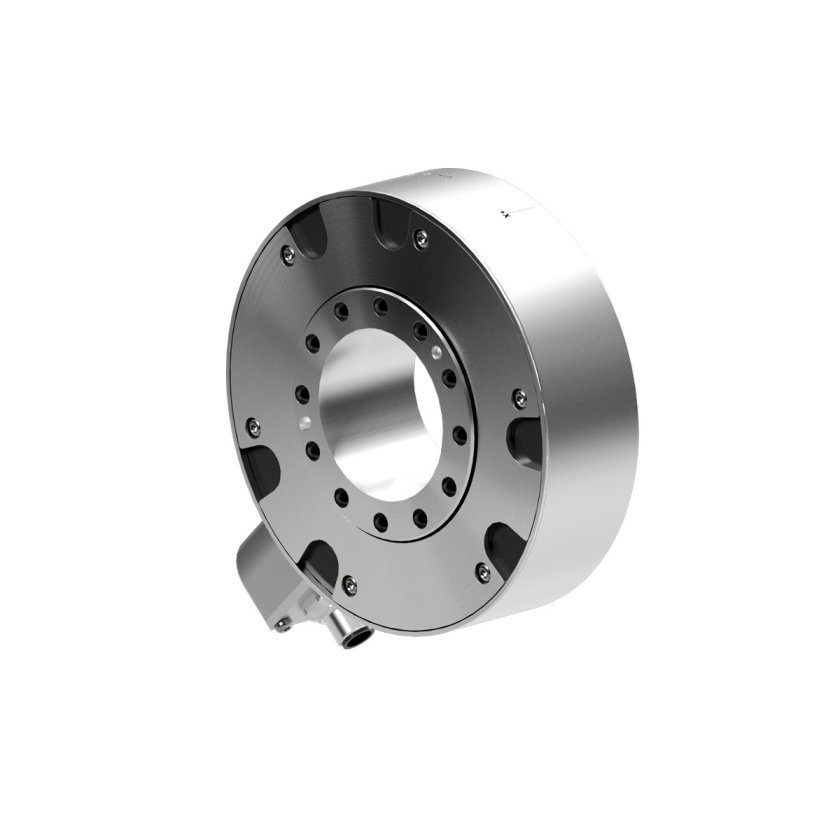
- Fator de forma – O design aparafusado reduz a altura da pilha e o furo passante de 50 mm o torna ideal para aplicações de robôs de pulso oco
- Kit de sensor de força/torque universal – Esse kit inclui um sensor, placa de interface padrão para montar o sensor em um robô, cabos e fonte de alimentação para facilitar a integração em uma ampla variedade de marcas e aplicações de robôs.
- Interface EtherCAT – Permite a comunicação em tempo real e em alta velocidade para o controle preciso de movimentos em ambientes de automação sincronizados e com vários eixos.
- Extremamente resistente – Usinado com precisão em alumínio de alta resistência para aeronaves, combinando durabilidade com baixo peso. Suporta sobrecargas de até 5,0 a 6,0 vezes a sua capacidade nominal.
- Alta relação sinal-ruído – Os strain gages de silício fornecem um sinal 75 vezes mais forte do que os foil gages convencionais. Esse sinal é amplificado, resultando em uma distorção de ruído quase nula.
- Classificação IP67 para proteção contra submersão – à prova de poeira e capaz de resistir à imersão temporária em água, permitindo uma operação confiável em ambientes úmidos ou de lavagem
| Specification | Value |
|---|---|
| Faixa de medição | 2000 N / 125 Nm |
| Faixa de detecção | |
| Faixa de detecção de força X/Y | ±2000 N |
| Faixa de detecção de torque X/Y | ±125 Nm |
| Faixa de detecção de força Z | ±4000 N |
| Z Faixa de detecção de torque | ±125 Nm |
| Resolução | |
| Resolução de detecção de força X/Y | 0.1575 N |
| Resolução do sensor de torque X/Y | 0.0075 Nm |
| Resolução do sensor de força Z | 0.1575 N |
| Z Resolução do sensor de torque | 0.0075 Nm |
| Sobrecarga | |
| Sobrecarga de eixo único de força X/Y | ±10000 N |
| Sobrecarga de eixo único Force Z | ±20000 N |
| Sobrecarga de eixo único de torque X/Y | ±620 Nm |
| Sobrecarga de eixo único de torque Z | ±620 Nm |
| Rigidez | |
| Força X/Y Rigidez calculada | 5.5×10^7 N/m |
| Torque X/Y Rigidez calculada | 1.2×10^5 Nm/rad |
| Força Z Rigidez calculada | 8.9×10^7 N/m |
| Torque Z Rigidez calculada | 2.1×10^5 Nm/rad |
| Frequência ressonante | |
| Frequência ressonante Fx/Fy/Tz | 2500 Hz |
| Fz/Tx/Ty Frequência ressonante | 4000 Hz |
| Outros | |
| Altura | 39.2 mm |
| Peso | 0.86 kg |
| Diâmetro | 130 mm |
| Classificação da placa de interface | IP67 |
| Interface de comunicação | EtherCAT |
| Precisão (% da escala total) | 2% |
| Latência | <1 ms |
| Taxa de dados | 8 kHz |
| Taxa de amostragem | 8 kHz |
| Conector | m12 de 8 pinos (ZC28) |
- Filtrar por Tipo
- Desenhos
- Manuais
- Gráfico de carregamento complexo
- Software
| Baixar | Tipo de download | Idioma |
|---|---|---|
| 9230-05-1555 | Desenhos | English |
| 9610-05-EtherCAT Axia130 | Manuais | English |
| 9620-05-B-Axia130 | Manuais | English |
| 9620-05-D-ATI KUKA FTCtrl | Manuais | English |
| 9630-05-0006 | Desenhos | English |
| Cabo Axia com tomada de força M12 | Desenhos | English |
| Gráficos de carga complexa Axia130-M125 | Gráfico de carregamento complexo | English |
| Arquivo ECAT3 Axia ESI | Software | English |
| Baixar | Descrição |
|---|---|
| AXIA130-M125 | Link para o modelo CAD 3C para AXIA130-M125 |
- Filtrar por Número da peça
- 9105-CBL-S-G1-Q5F-WWPS1-1.5
- 9105-CKIT-ZC28-ZC28-5
- 9105-C-ZC28-MS-RJ45S-4
| Número da peça | Descrição | ||
|---|---|---|---|
 |
9105-CBL-S-G1-Q5F-WWPS1-1.5 |
Fonte de alimentação para montagem em parede F/T, saída de 24 VDC, plugues internacionais |
|
|
|
9105-CKIT-ZC28-ZC28-5 | Kit de cabos, sensor Axia130 M12 de 8 pinos para M12 de 8 pinos, 5 m, concha blindada |
|
|
|
9105-C-ZC28-MS-RJ45S-4 | Cabo, M12 de 8 pinos blindado com concha dividida para M12 de 5 pinos e RJ45 blindado |
|
| Calibração | Faixa de detecção de força X/Y | Faixa de detecção de força Z | Faixa de detecção de torque X/Y | Faixa de detecção de torque Z | Resolução de detecção de força X/Y | Resolução de detecção de força Z | Resolução de detecção de torque X/Y | Resolução de detecção de torque Z |
|---|---|---|---|---|---|---|---|---|
| SI-2000-125 | 2000 N | 4000 N | 125 Nm | 125 Nm | 0.625 N | 0.625 N | 0.025 Nm | 0.025 Nm |
