


Produktmerkmale
- 6-achsige Kraft-/Drehmomentmessung – Misst Kraft und Drehmoment in allen sechs Freiheitsgraden (Fx, Fy, Fz, Tx, Ty, Tz) mit Bereichen bis zu 2000 N Kraft und 125 Nm Drehmoment für anspruchsvolle Roboter- und Industrieanwendungen
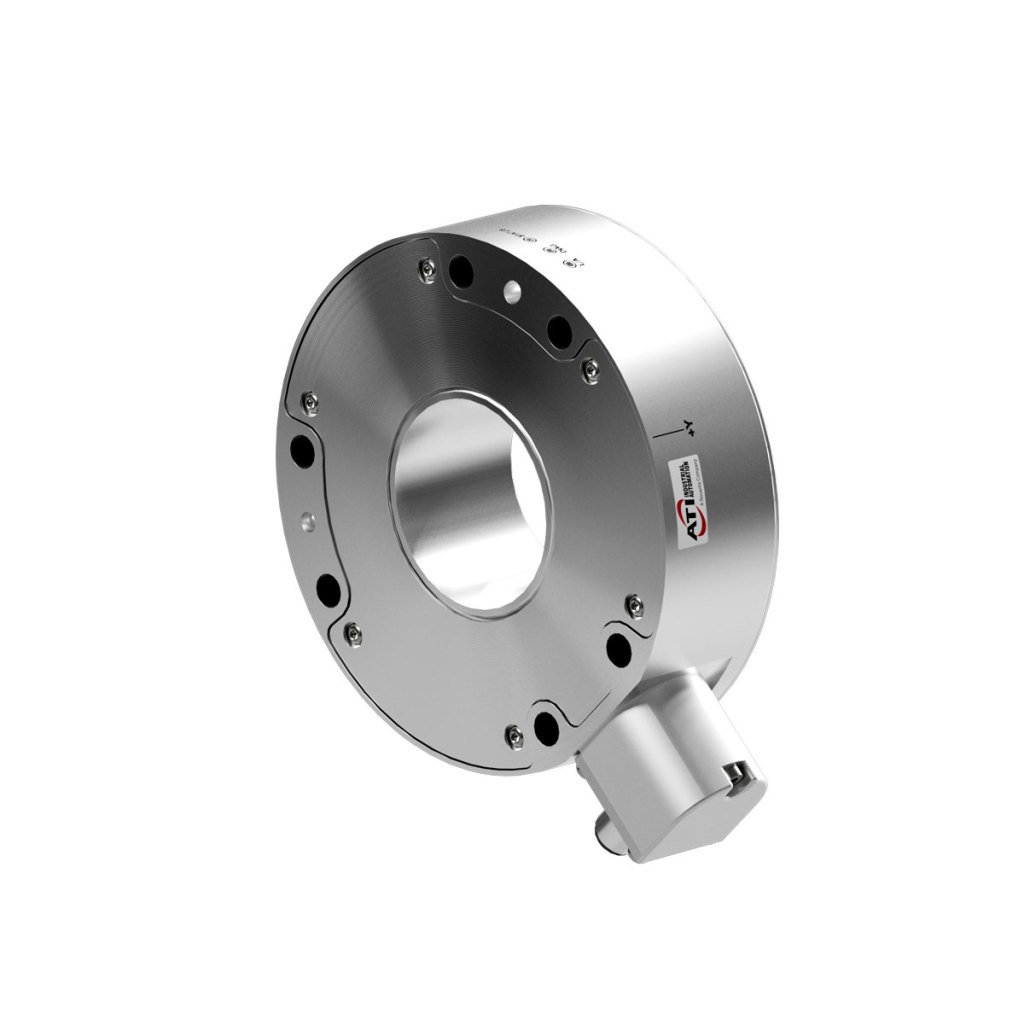
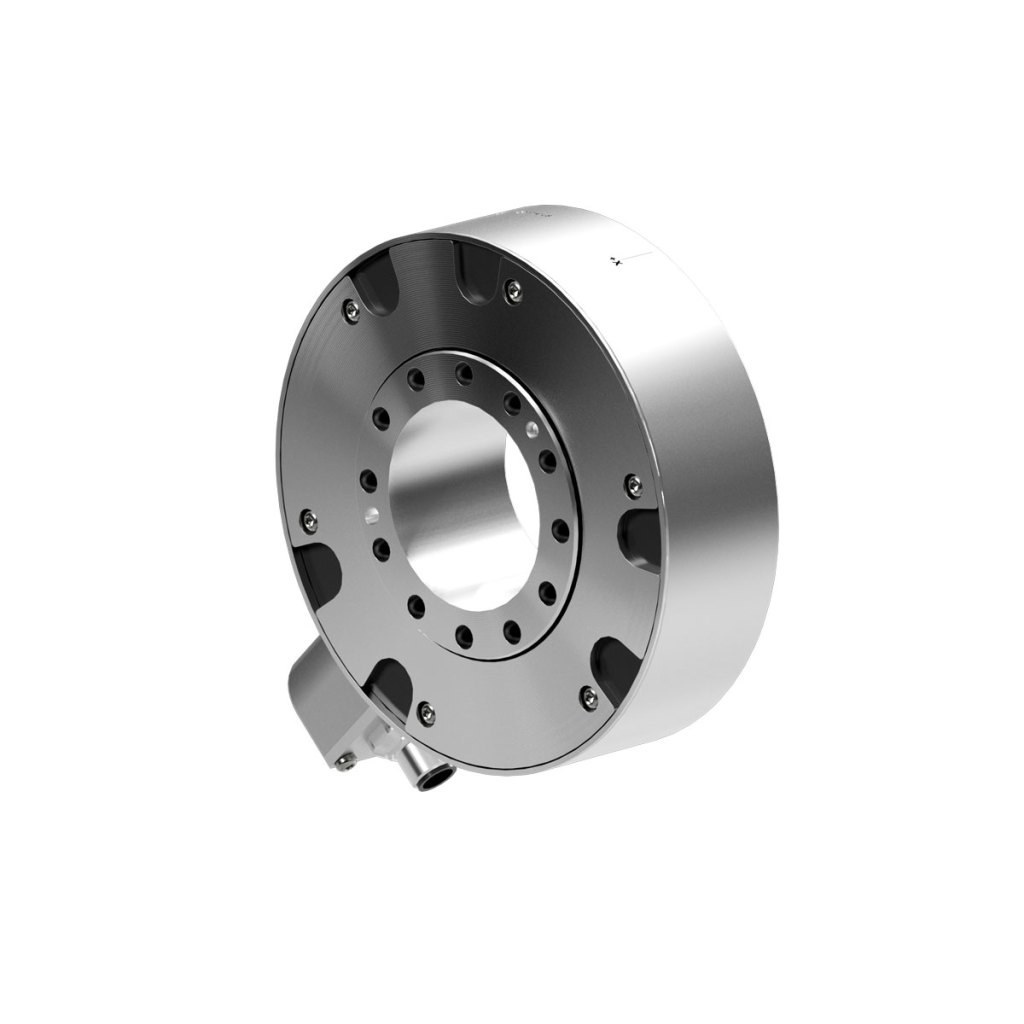
- Formfaktor – Das Bolzen-Down-Design reduziert die Stapelhöhe und die 50-mm-Durchgangsbohrung macht ihn ideal für Roboteranwendungen mit hohlem Handgelenk
- Universal-Kraft-/Drehmomentsensor-Kit – Dieses Kit enthält einen Sensor, eine Standard-Schnittstellenplatte zur Montage des Sensors an einem Roboter, Kabel und eine Stromversorgung für die einfache Integration in eine Vielzahl von Robotermarken und -anwendungen.
- EtherCAT-Schnittstelle – Ermöglicht Hochgeschwindigkeitskommunikation in Echtzeit für präzise Bewegungssteuerung in synchronisierten Mehrachsen-Automatisierungsumgebungen.
- Extrem hohe Festigkeit – Präzisionsgefertigt aus hochfestem Flugzeugaluminium, das Haltbarkeit mit geringem Gewicht kombiniert. Kann Überlasten bis zum 5,0- bis 6,0-fachen seiner Nennkapazität bewältigen.
- Hohes Signal-Rausch-Verhältnis – Silizium-Dehnungsmessstreifen liefern ein 75-mal stärkeres Signal als herkömmliche Folienmessstreifen. Dieses Signal wird verstärkt, was zu einer Rauschverzerrung von nahezu Null führt.
- Schutzklasse IP67 für Untertauchschutz – Staubdicht und geeignet für zeitweiliges Eintauchen in Wasser, was einen zuverlässigen Betrieb in feuchten oder nassen Umgebungen ermöglicht
| Spezifikation | Wert |
|---|---|
| Messbereich | 2000N / 125Nm |
| Kraft X/Y Einzelachse Überlast | ±10000 N |
| Kraft Z Einachsige Überlast | ±20000 N |
| Drehmoment X/Y Einzelachse Überlast | ±620 Nm |
| Drehmoment Z Einachsige Überlast | ±620 Nm |
| Kraft X/Y Berechnete Steifigkeit | 5.5×107 N/m |
| Drehmoment X/Y Berechnete Steifigkeit | 1.2×105 Nm/Rad |
| Kraft Z Berechnete Steifigkeit | 8.9×107 N/m |
| Drehmoment Z Berechnete Steifigkeit | 2.1×105 Nm/Rad |
| Fx/Fy/Tz Resonanzfrequenz | 2500 Hz |
| Fz/Tx/Ty Resonanzfrequenz | 4000 Hz |
| Auflösung der X/Y-Kraftmessung | 0.158 N |
| X/Y-Kraftmessbereich | ±2000 N |
| X/Y-Drehmomenterfassung Auflösung | 0.0075 Nm |
| X/Y-Drehmomentmessbereich | ±125 Nm |
| Z Force Sensing Auflösung | 0.158 N |
| Z Kraftmessbereich | ±4000 N |
| Z Auflösung der Drehmomenterfassung | 0.0075 Nm |
| Z Drehmomenterfassungsbereich | ±125 Nm |
| Höhe | 39.2 mm |
| Gewicht | 0.86 kg |
| Durchmesser | 130 mm |
| IP-Bewertung | IP67 |
| Kommunikationsschnittstelle | EtherCAT |
| Anschluss | ZC28 |
- Filtern nach Typ
- Dokumente
- Zeichnungen
- Handbücher
| Herunterladen | Typ herunterladen | Sprache |
|---|---|---|
| Für Kunden, die einen ATI EtherCAT F/T Sensor mit KUKA.ForceTorqueControl (FTCtrl) verwenden | Dokumente | Englisch |
| Netto F/T Handbuch | Dokumente | Englisch |
| F/T Universal Roboter (URe) Handbuch | Dokumente | Englisch |
| F/T Universal Roboter Programmier- und Demoanleitung | Dokumente | Englisch |
| Ethernet Axia130 Handbuch | Dokumente | Englisch |
| Für Axia130-Kunden, die ihren Sensor mit der Force Control Software von FANUC verwenden möchten | Dokumente | Englisch |
| RS422 Axia130 Handbuch | Dokumente | Englisch |
| RS485 Axia130 Handbuch | Dokumente | Englisch |
| Axia130 F/T Sensor Handbuch | Dokumente | Englisch |
| Axia130 Kundenzeichnung | Zeichnungen | Englisch |
| FANUC F/T-Kits mit Axia130-Schwinger | Zeichnungen | Englisch |
| 9610-05-EtherCAT Axia130 | Dokumente | Englisch |
| EtherCAT Axia130 Handbuch | Dokumente | Englisch |
| Ethernet Axia130 Handbuch | Dokumente | Englisch |
| Für Axia130-Kunden, die ihren Sensor mit der Force Control Software von FANUC verwenden möchten | Dokumente | Englisch |
| RS422 Axia130 Handbuch | Dokumente | Englisch |
| RS485 Axia130 Handbuch | Dokumente | Englisch |
| Axia130 F/T Sensor Handbuch | Dokumente | Englisch |
| ECAT3 Kraft-Momenten-Sensor Handbuch | Handbücher | Englisch |
| Herunterladen | Beschreibung |
|---|---|
| Axia130-M125 | 9105-Axia130-M125 |
| 9105-Axia130-M125 | 9105-Axia130-M125 |
- Filtern nach Teil Nummer
- 9105-IP-2274
- 9105-IP-2273
- 9105-IP-2280
- 9105-IP-2281
- 9105-C-ZC28-MS-ZC51-4
- 9105-CBL-S-G1-Q5F-WWPS1-1.5
- 9105-GEN3-SPLIT-001
- 9105-GEN3-BOB-001
| Teil Nummer | Beschreibung | ||
|---|---|---|---|
 |
9105-IP-2274 | IP-Kit für Axia130 Transducer MAP mit BC100, (6)M8 Gewinde, Aussparung 63, Dübel 8 |
|
|
|
9105-IP-2273 | IP Kit für Axia130 Transducer TAP mit BC100,(6)M8 Gewinde, Aussparung 63, Dübel 8 |
|
|
|
9105-IP-2280 | IP-Kit für Axia130 Wandler TAP zu BC125, (6)M10 Gewinde, Aussparung 80, Dübel 10 |
|
|
|
9105-IP-2281 | IP-Kit für Axia130 Messumformer MAP zu BC125, (6)M10 Gewinde, Aussparung 80, Dübel 10 |
|
|
|
9105-C-ZC28-MS-ZC51-4 |
Kabel, 8-polig M12, geschirmt, geteilt auf 5-polig M12 und geschirmt FIO-JD6 |
|
|
|
9105-CBL-S-G1-Q5F-WWPS1-1.5 |
F/T Wandmontage-Netzteil, 24VDC-Ausgang, internationale Stecker |
|
 |
9105-GEN3-SPLIT-001 |
FT Splitter Box, ECAT3- und NETrs-kompatibel, 12-polige M12-Dose auf 4-polige D-code M12 und 5-polige Acode M12 |
|
|
|
9105-GEN3-BOB-001 |
|
