


Características del producto
- detección de fuerza/par en 6 ejes: mide la fuerza y el par en los seis grados de libertad (Fx, Fy, Fz, Tx, Ty, Tz) con rangos de hasta 2000 N de fuerza y 125 Nm de par para aplicaciones robóticas e industriales exigentes
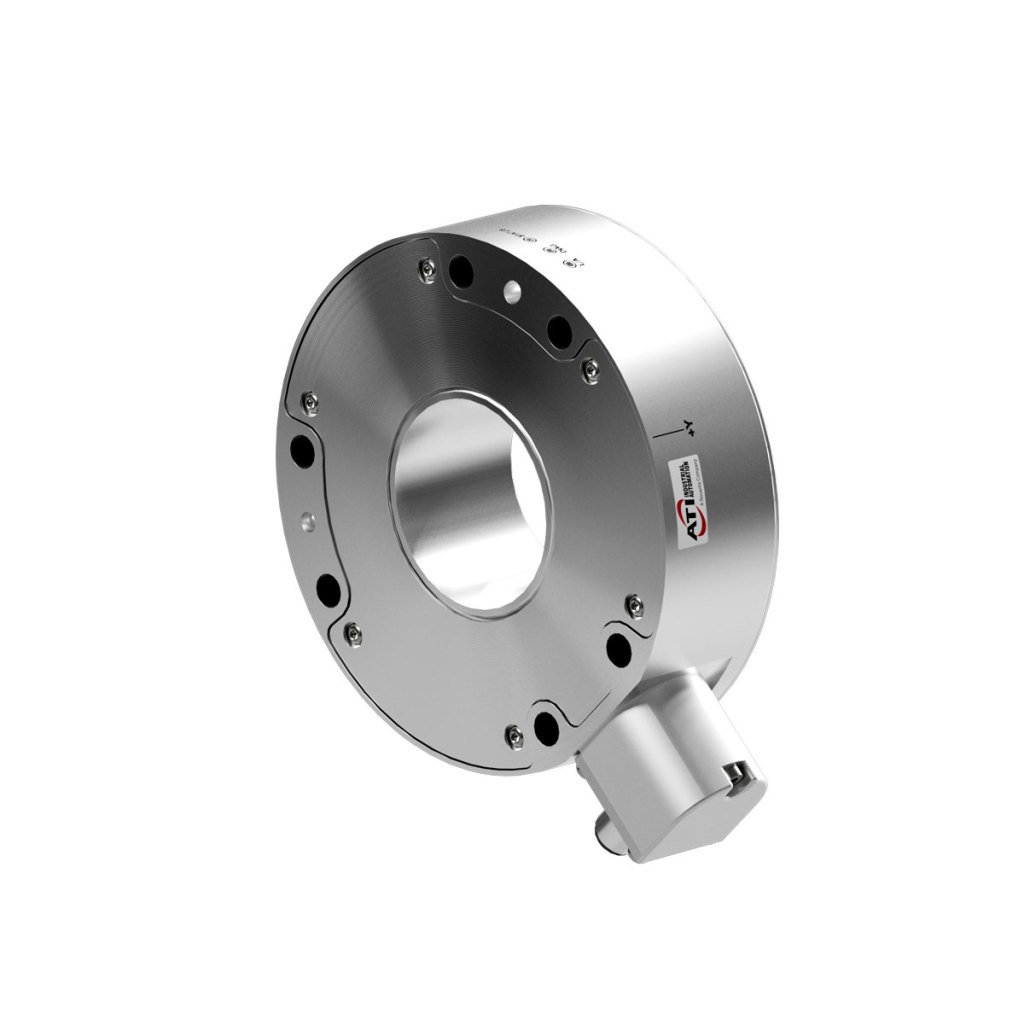
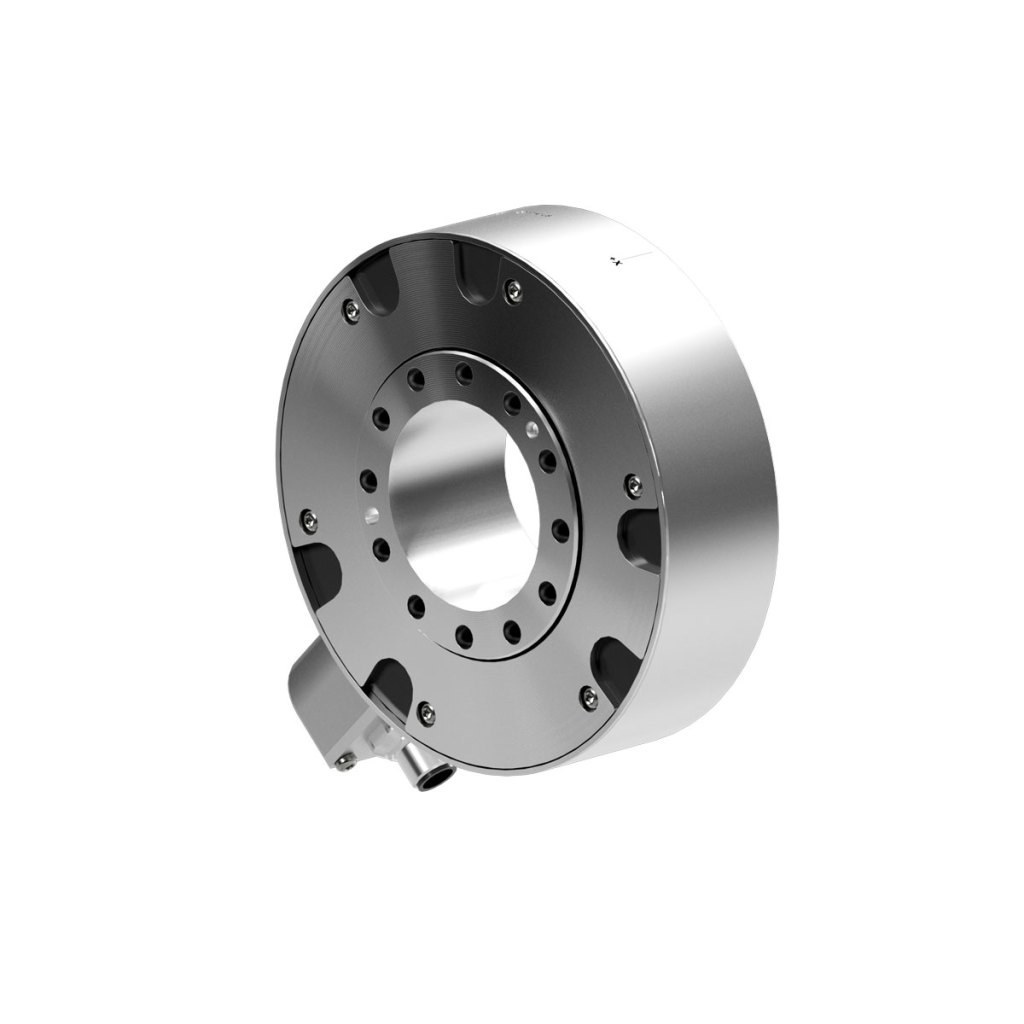
- Factor de forma – El diseño atornillado reduce la altura de la pila y el orificio pasante de 50 mm lo hace ideal para aplicaciones de robots de muñeca hueca
- Kit de sensor de fuerza/par universal – Este kit incluye un sensor, una placa de interfaz estándar para montar el sensor en un robot, cables y fuente de alimentación para facilitar la integración en una amplia gama de marcas de robots y aplicaciones.
- Interfaz EtherCAT – Permite la comunicación de alta velocidad en tiempo real para el control de movimiento de precisión en entornos de automatización multieje sincronizados.
- Resistencia extremadamente alta: mecanizado de precisión a partir de aluminio de calidad aeronáutica de alta resistencia, que combina durabilidad con bajo peso. Soporta sobrecargas de hasta 5,0 a 6,0 veces su capacidad nominal.
- Alta relación señal/ruido – Las bandas extensométricas de silicona proporcionan una señal 75 veces más potente que las bandas de lámina convencionales. Esta señal se amplifica, lo que da como resultado una distorsión de ruido casi nula.
- Grado de protección IP67 contra inmersión: son herméticas al polvo y capaces de soportar la inmersión temporal en agua, lo que permite un funcionamiento fiable en entornos húmedos o de lavado
| Especificación | Valor |
|---|---|
| Rango de medición | 2000N / 125Nm |
| Fuerza X/Y Sobrecarga de un eje | ±10000 N |
| Fuerza Z Sobrecarga de un eje | ±20000 N |
| Sobrecarga de par en un eje X/Y | ±620 Nm |
| Par Z Sobrecarga de un eje | ±620 Nm |
| Fuerza X/Y Rigidez calculada | 5.5×107 N/m |
| Par X/Y Rigidez calculada | 1.2×105 Nm/rad |
| Fuerza Z Rigidez calculada | 8.9×107 N/m |
| Par Z Rigidez calculada | 2.1×105 Nm/rad |
| Fx/Fy/Tz Frecuencia de resonancia | 2500 Hz |
| Fz/Tx/Ty Frecuencia de resonancia | 4000 Hz |
| Resolución de detección de fuerza X/Y | 0.158 N |
| Rango de detección de fuerza X/Y | ±2000 N |
| Resolución de detección de par X/Y | 0.0075 Nm |
| Rango de detección de par X/Y | ±125 Nm |
| Z Resolución de detección de fuerza | 0.158 N |
| Z Rango de detección de fuerza | ±4000 N |
| Z Resolución de detección de par | 0.0075 Nm |
| Z Rango de detección de par | ±125 Nm |
| Altura | 39.2 mm |
| Peso | 0.86 kg |
| Diámetro | 130 mm |
| Clasificación IP | IP67 |
| Interfaz de comunicación | EtherCAT |
| Conector | ZC28 |
- Filtrar por Tipo
- Documentos
- Dibujos
- Manuales
| Descargar | Tipo de descarga | Idioma |
|---|---|---|
| Para clientes que utilizan sensores ATI EtherCAT F/T con KUKA.ForceTorqueControl (FTCtrl) | Documentos | Inglés |
| Net F/T Manual | Documentos | Inglés |
| Manual del Robot Universal (URe) F/T | Documentos | Inglés |
| Guía de programación y demostración de F/T Universal Robot | Documentos | Inglés |
| Manual Ethernet Axia130 | Documentos | Inglés |
| Para clientes de Axia130 que deseen utilizar su sensor con el software de control de fuerza de FANUC | Documentos | Inglés |
| Manual RS422 Axia130 | Documentos | Inglés |
| Manual RS485 Axia130 | Documentos | Inglés |
| Manual del sensor Axia130 F/T | Documentos | Inglés |
| Axia130 Dibujo del cliente | Dibujos | Inglés |
| Kits F/T FANUC con transductor Axia130 | Dibujos | Inglés |
| 9610-05-EtherCAT Axia130 | Documentos | Inglés |
| Manual EtherCAT Axia130 | Documentos | Inglés |
| Manual Ethernet Axia130 | Documentos | Inglés |
| Para clientes de Axia130 que deseen utilizar su sensor con el software de control de fuerza de FANUC | Documentos | Inglés |
| Manual RS422 Axia130 | Documentos | Inglés |
| Manual RS485 Axia130 | Documentos | Inglés |
| Manual del sensor Axia130 F/T | Documentos | Inglés |
| Manual del sensor de fuerza y par ECAT3 | Manuales | Inglés |
| Descargar | Descripción |
|---|---|
| Axia130-M125 | 9105-Axia130-M125 |
| 9105-Axia130-M125 | 9105-Axia130-M125 |
- Filtrar por Número de pieza
- 9105-IP-2274
- 9105-IP-2273
- 9105-IP-2280
- 9105-IP-2281
- 9105-C-ZC28-MS-ZC51-4
- 9105-CBL-S-G1-Q5F-WWPS1-1.5
- 9105-GEN3-SPLIT-001
- 9105-GEN3-BOB-001
| Número de pieza | Descripción | ||
|---|---|---|---|
 |
9105-IP-2274 | Kit IP para transductor Axia130 MAP con BC100, (6)M8 roscados, rebaje 63, pasador 8 |
|
|
|
9105-IP-2273 | Kit IP para transductor Axia130 TAP con BC100,(6)M8 roscado, rebaje 63, pasador 8 |
|
|
|
9105-IP-2280 | Kit IP para transductor Axia130 TAP a BC125, (6)M10 roscado, rebaje 80, pasador 10 |
|
|
|
9105-IP-2281 | Kit IP para transductor Axia130 MAP a BC125, (6)M10 roscado, rebaje 80, pasador 10 |
|
|
|
9105-C-ZC28-MS-ZC51-4 |
Cable, M12 apantallado de 8 clavijas dividido en M12 de 5 clavijas y apantallado FIO-JD6 |
|
|
|
9105-CBL-S-G1-Q5F-WWPS1-1.5 |
Fuente de alimentación F/T de montaje en pared, salida de 24 VCC, enchufes internacionales |
|
 |
9105-GEN3-SPLIT-001 |
Caja divisora FT, compatible con ECAT3 y NETrs, M12 hembra de 12 patillas a M12 D-code de 4 patillas y M12 Acode de 5 patillas |
|
|
|
9105-GEN3-BOB-001 |
|
